|
|
| Exploring multiple transputer arrays _____________________________________________________________________ |
| Neil Miller May 1988 |
A transputer is a component computing device which can easily be connected to form networks in multiprocessor arrays. These arrays can become quite large and complex. This technical note describes an ’exploratory worm program’, which will explore an unknown network of transputers, and determine its configuration. This is useful in confirming that the transputers have been connected in a particular configuration, as required for some particular task, and that they are all working properly. Further applications include testing a network for reliability, and loading code into a network whose configuration is not known in advance.
The exploration is achieved by having a program which will worm its way around the network, exploring all the links on all the transputers to determine the interconnections. An example of an exploratory worm program, which is referred to in this technical note, is available as part of the Transputer Development System. This program explores a network made up of an unlimited number of IMS T414 transputers. Some notes about further applications are given in section 6.
The transputer development system (TDS) recognises two different types of program, known as EXE and as PROGRAM. An EXE program runs on the host transputer, and may access the keyboard, screen, and filing system of the host machine. A PROGRAM, on the other hand, runs on a network of one or more transputers, and is loaded from the host transputer via a transputer link. This link may be the network’s only connection with the outside world.
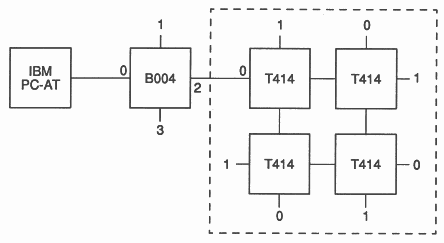
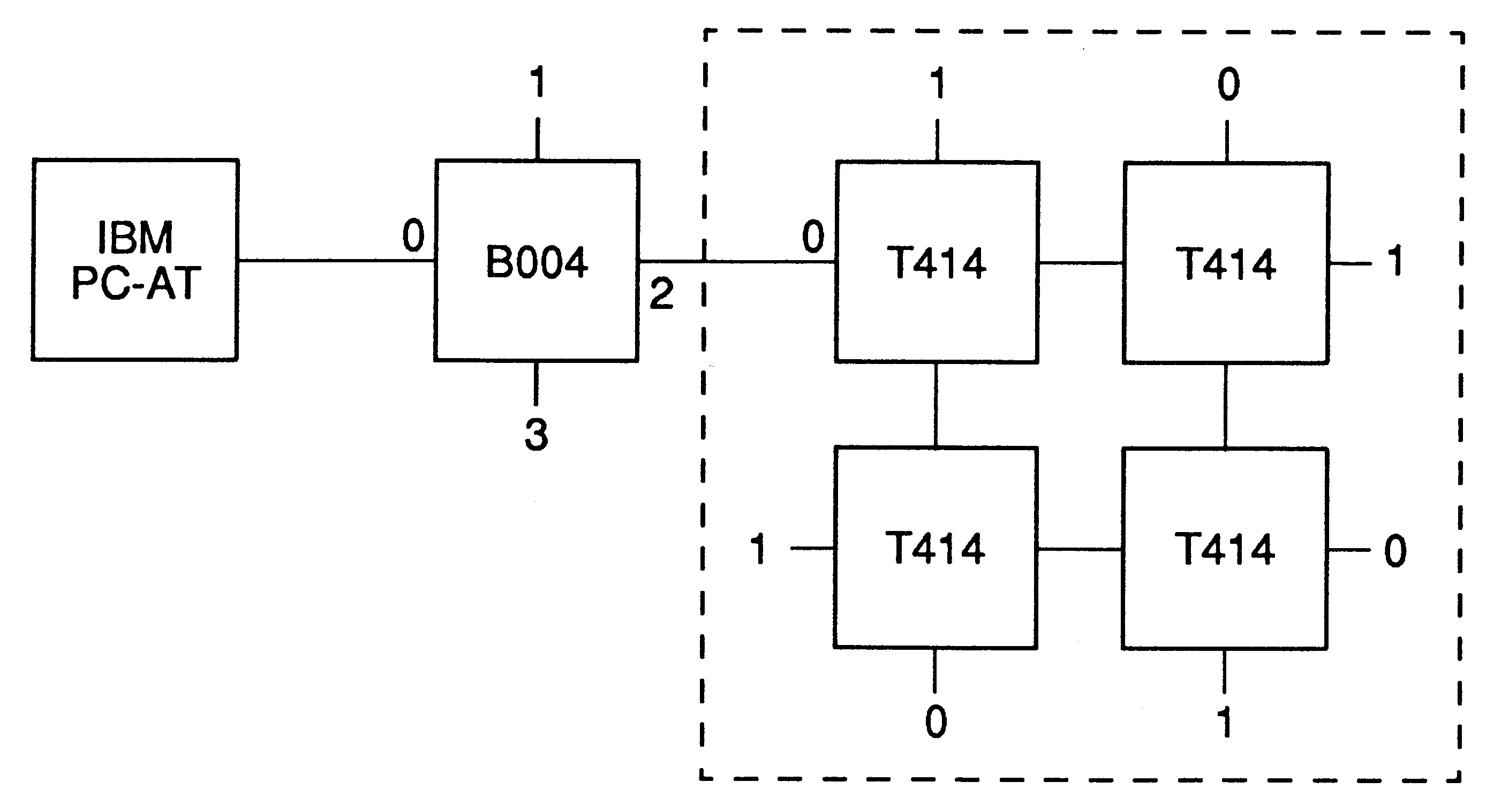
An example of such a system is given in figure 1. This shows an IBM PC-AT with an INMOS B004 evaluation board, running a single IMS T414 transputer and 2 megabytes of external ram. This transputer acts as the host processor for the development of programs, and for loading multiple transputer networks. Link 2 of the B004 is connected to an INMOS B003 evaluation board, which runs 4 IMS T414s, each with 256 kilobytes of memory.
Typically, when a PROGRAM is loaded onto a multiple transputer network, a simple EXE program will also be run on the host transputer which monitors the output transmitted back from the PROGRAM, sends results to the screen, passes on any input from the keyboard, and controls the TDS filing system, as required.
A simple PROGRAM, intended to run on a network of just one transputer, looks like this:
{{{ PROGRAM Example
{{{F ... SC Example PROCESSOR 0 T4 Example () }}} }}} |
When this bundle is compiled, configured and extracted, a new fold is created:
...F CODE PROGRAM Example
|
If extracted as a BOOTABLE type fold (as opposed to a DIAGNOSTIC fold), this CODE PROGRAM fold will just contain code which will initialise and load a single transputer, and run SC Example. Thus, if an occam byte array Program contains the contents of a bootable CODE PROGRAM fold, then the effect of
ToLink ! Program
|
is to load and run the program on a transputer connected to link ToLink. The precise way in which a transputer loads code does not concern us here - it is described in full in [1].
A program may thus explore a network of transputers as follows:
Suppose that a transputer is already running an exploratory worm program, and that it is connected to another transputer, which has not yet been loaded with code. The first transputer, which will be called the ’parent’, loads the second (’daughter’) by outputting the code Program as above. It then sends Program a second-time, which the daughter stores as a byte array in memory. The daughter is now also in a position to load other transputers, and so on, until the entire network is loaded.
To achieve this, the exploratory worm program is made up of two parts:
... EXE Host - This runs on the host transputer
... PROGRAM Worm - This explores the network |
The Host EXE reads the CODE PROGRAM Worm fold, and stores it in a byte array Program. After resetting the network, it then loads this program onto the first transputer in the network by outputting Program on an appropriate link. As the worm proceeds to explore the network, the program running on the host transputer processes any data returned to it from the worm, interpreting and displaying the results.
The following section (section 3) describes the EXE program which runs on the host transputer, while section 4 describes the PROGRAM which actually explores the network. Section 5 shows some typical results. Section 6 provides some notes on extending the exploratory worm for different uses.
In describing the program, declarations and channel protocols have been left out, for brevity, except where they may not be obvious. Variable names start with a lower case letter, constants with a capital. Tokens, indicated by the suffix .t, are used to communicate a particular meaning on a channel, for example, NoMoreData.t. Similarly, a suffix .v is used to indicate a particular interpretation of a stored value, for example, assigning the value UnAttached.v to a word which describes the status of a link.
It is assumed that each transputer can access enough memory to run the exploratory worm - information about the memory requirements may be obtained by creating a configuration information fold for the PROGRAM.
The program which runs on the host transputer looks like this:
SEQ
code.fold.reader (Screen, from.user.filer[0], to.user.filer[0], programTable, programLength, errorFlag) IF errorFlag SKIP TRUE SEQ ... Determine which link to examine ... Reset subsystem, links -- Main section VAL Program IS [programTable FROM 0 FOR programLength] PAR WormHandler (LinkIn[linkNumber], LinkOut[linkNumber], ToInterface, linkNumber, Delay, Program) Interface (ToInterface, SoftScreen, Heading, linkNumber) ... Display and file output using standard procs write.full.string (Screen, "*C*NType <any> to continue") Keyboard ? word |
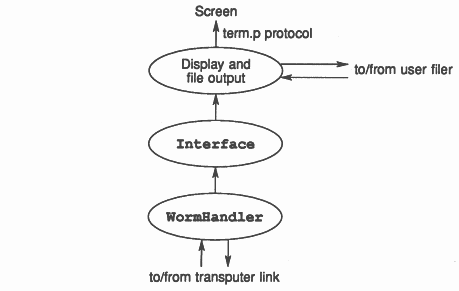
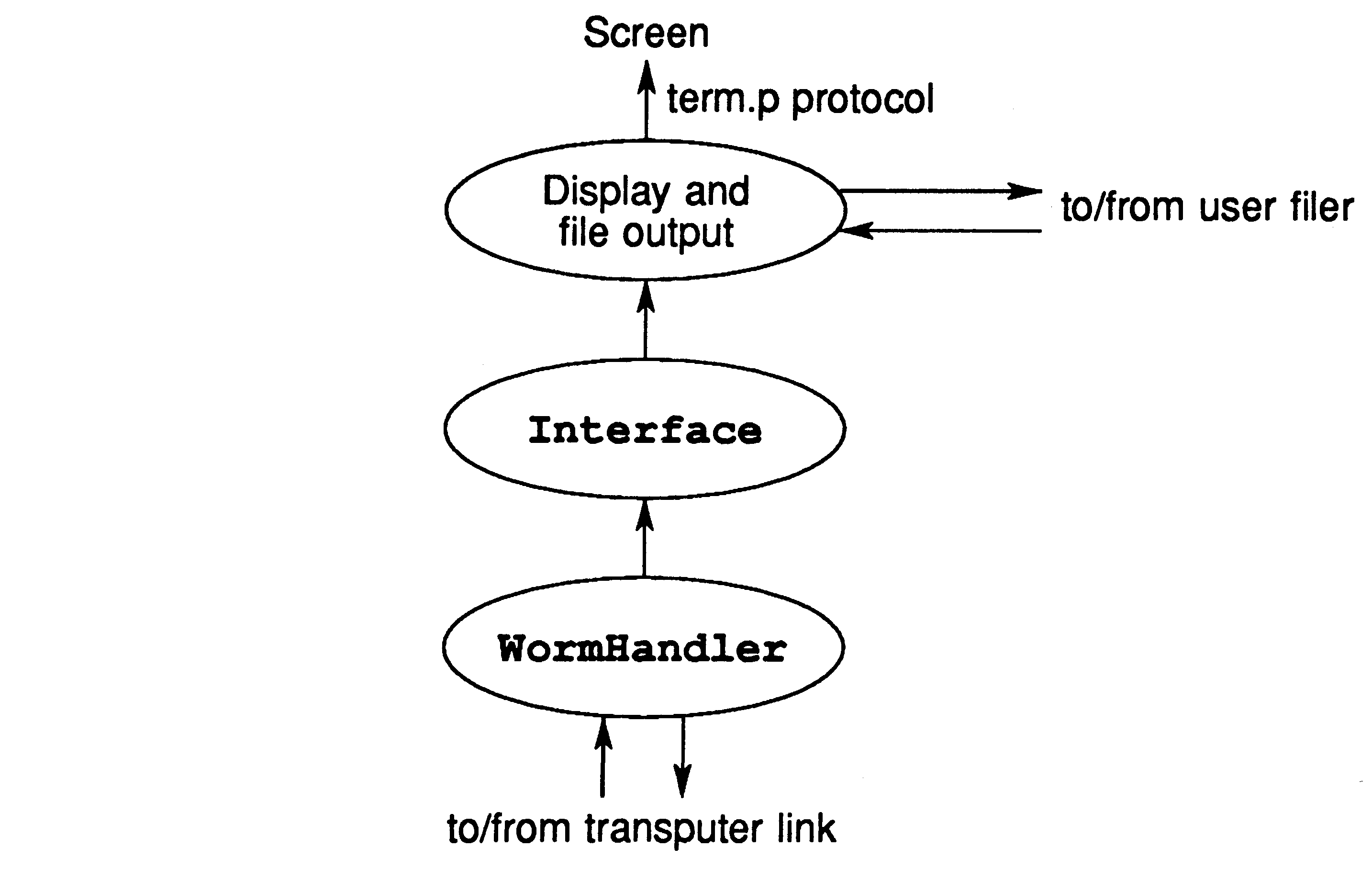
After determining which of the host transputer’s links is to be explored, and resetting the subsystem network, the main section of the program is structured as in figure 2. The components are described in the following sections.
The process code.fold.reader provided in the example exploratory worm program will attempt to read a CODE PROGRAM fold from inside a fold bundle, which may be a compiled or uncompiled PROGRAM fold, or a plain text fold. The latter option is included for reasons which are described in the section on filing the output.
The reading and writing of folds and files is described in [1] an error occurs, the boolean errorFlag is set to TRUE, and the cause of the error is displayed on channel Screen, using the term.p protocol.
It is assumed that the reset pins of the subsystem network are chained together, and controlled by the host transputer (for example, the Subsystem Reset pin on a B004, as described in [2]). In order to reset the transputers correctly, the reset pin must be held high for a certain minimum period of time - a millisecond is ample.
The program asks the user which link of the host transputer, linkNumber, is to be examined - the link which is connected to the subsystem must be stated. None of the other links will be tried during the course of the program. If two (or more) links are connected to the same subsystem, then only one can be tried. In this case, the other link will receive data from the subsystem, as the worm program explores, which remains unacknowledged. In order that this does not upset any program running on the host transputer after the exploratory worm has completed, all the links are reset on completion of the program. The resetting of links is described in [3].
The channels LinkIn, LinkOut have been placed at the transputer’s hard links. This process attempts to load a transputer connected to link linkNumber with the exploratory worm program. However, there may be nothing connected at all, or the transputer connected may not have been reset, or not powered on, or some other simple problem, in which case the output will fail. To cater for this eventuality, the OutputOrFail routines described in [3] are used. If the output of the code Program is not completed within a period Delay, then it is abandoned, and the link is reset. This makes it possible for the program to terminate neatly, even if there is no transputer connected to the link.
If the code Program is successfully output from the link, booting a transputer, then PROC WormHandler sends more data, as described in section 4.3. In particular, this new transputer is given an identity number ’0’. As the exploration proceeds, PROC WormHandler relays data back from the network to PROC Interface.
The Interface process is passed data from the worm handler. This is interpreted, and text is output on channel SoftScreen using the term.p protocol [1].
The output from PROC Interface is suitable for immediate display on the screen. However, the standard library processes scrstream.fan.out and scrstream.to.file are used to file a copy of the output. To do this, the user must transfer the CODE PROGRAM fold from the PROGRAM Worm fold into an empty text fold. When the EXE is run, pointing at this text fold, then a new, filed fold will be created which contains the output from PROC Interface:
{{{ Results
...F CODE PROGRAM Worm ...F Output will appear here }}} |
write.endstream is used to close down these processes.
If the program is run while pointing at a PROGRAM fold, results are displayed but not filed.
As described in section 2, the exploratory worm program is constructed as a PROGRAM fold which consists of a separately compiled process, SC worm, placed on a single transputer. This is then extracted to produce a CODE PROGRAM Worm fold, which contains code to boot a transputer and run SC Worm on that transputer. This section now describes how that SC is constructed.
The exploratory worm is structured as follows
SEQ
... Read in copy of program, identify boot link ... Initialise SEQ I = 0 FOR NLinks ... Try each link in turn ... Return control to parent ... Feed back final link information to parent |
When SC Worm starts to run on a transputer, it first identifies which link is connected to its parent, i.e. which of its neighbours booted it, and inputs a copy of the program code so that it, too, may boot other transputers.
After initialising various flags (which keep track of which links have been explored, etc.), the program now picks a link, and tries to send a probe down the link, which may (or may not) be connected to another transputer. An OutputOrFail routine is again used, and if the program does not receive any response, it will timeout and look elsewhere.
The period of time for which program is prepared to wait, Delay, is quite critical. It must be long enough for any neighbour to have the chance to reply, but not so long that the program is slow to explore a large network of transputers. A Delay of 30 milliseconds has been found to be appropriate.
Section 4.2 describes the way in which a transputer probes a link to test whether a neighbouring transputer is attached. Section 4.3 describes how, if this is successful, the program is loaded and run on the neighbour. These are incorporated into the exploration worm in section 4.4, which describes a simple algorithm for exploring a tree of transputers. In section 4.5, this algorithm is generalised, to enable the exploration of a general network of transputers.
A transputer can conveniently test whether link I is attached to an unbooted neighbouring transputer by using the Peek and Poke feature [4]. For example, it may load a word of data at an address, and then read it back, as follows:
[4]CHAN OF ANY LinkIn, LinkOut :
PLACE LinkIn AT 4 : PLACE LinkOut AT 0 : SEQ LinkIn[I] ! 0(BYTE); Address; Data -- Poke LinkIn[I] ! 1(BYTE); Address -- Peek LinkOut[I] ? word -- Data is returned |
Provided that the address specified exists in memory, then the word returned should match the data sent. A suitable address is MinInt, the minimum 32-bit integer, i.e. #80000000, the bottom of the neighbouring transputer’s internal ram.
In practice, an OutputOrFail routine is used for peeking and poking, in case the link is unattached. If successful, the Data is returned on hard channel LinkIn[I]. Otherwise, (after a time Delay has elapsed,) the program assumes that the link is unattached.
Having determined that a link is connected to an unbooted neighbour, a transputer loads a neighbouring, unbooted transputer by outputting the code Program, as mentioned in section 2. The newly booted neighbour will first read in a copy of the program, and identify the boot link:
SEQ
ALT I = 0 FOR 4 -- Determine which link is connected -- to my parent! LinkIn[I] ? programLength parentLink := I LinkIn[parentLink] ? [programTable FROM 0 FOR programLength] LinkIn[parentLink] ? token; loadingData loadingData[3] := parentLink LinkOut[parentLink] ! LoadingData.t; loadingData LinkIn[parentLink] ? token -- Synchronise.t token from the host |
The parent sends the length of the program, which enables the daughter to determine which link is connected to the parent. The code Program is sent again, and stored by the daughter as a byte array for future use. The parent also sends a set of data which includes the parent identity number, the link attached to the daughter, and the number of transputers found so far, nTransputers. The daughter returns the data, with the link on which the daughter was booted appended.
The data returned by the daughter is referred to as loadingData. loadingData contains information useful to follow the path of the worm. Its four elements are, in order, the identity number of the parent, the link which the parent used to boot the daughter, the identity number of the daughter, and the link on which the daughter was booted. This array is transmitted back to the host transputer for display. The WormHandler process, running on the host, acknowledges receipt of the loadingData with a Synchronise.t token, transmitted back to the new daughter.
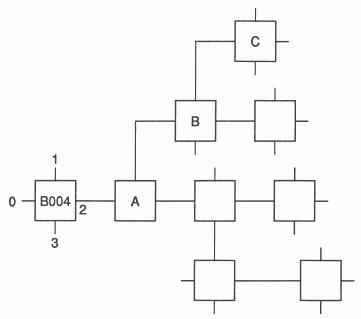
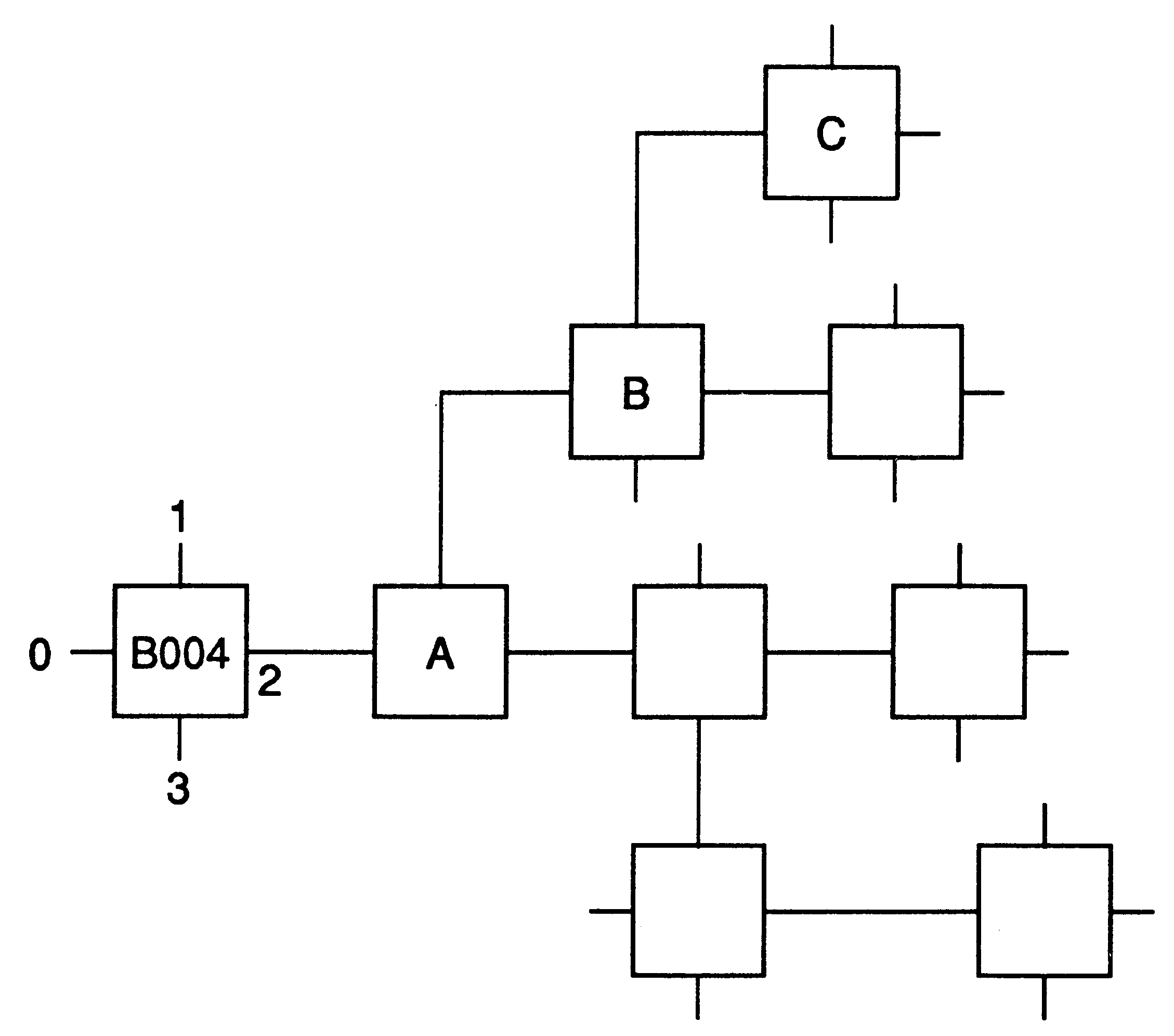
This section describes a simplified version of the exploration algorithm, suitable for exploring a tree, i.e. a network in which there are no closed loops. The complete algorithm is described in section 4.5. An example of a tree of transputers is shown in figure 3.
The worm explores the branches of the tree sequentially. Excluding the host transputer, each transputer in the tree will be in one of the following states:
The network is then explored as follows
Consider figure 3 as an example. Suppose that link 3 of transputer A has booted transputer B by link 0, and B has input a copy of the program from A. A enters stage 3, in which it will wait passively to transmit further data. Transputer B starts stage 1, probing one of its links to see if any other transputer is connected. Since link 0 is known to be connected to transputer A, link 1 is the first link to be probed. As described in section 4.1, the nucleus attempts to poke and then peek any transputer which may be attached to that link. The nucleus then waits for a word (which should be MinInt), to be returned on input link 0, for a period of time, Delay, before timing out. If nothing is returned, the program assumes this link is unattached, and sets a boolean downLoad[0] to FALSE. The next link, link 2, is probed in a similar manner.
However, let us assume that a transputer is attached to link 1, and that it has returned the value MinInt in response to the probing. Transputer B now attempts to load the neighbour with code (stage 2), as described in the previous section.
Call this new daughter ’C’. C determines its parentLink, the code Program, and loadingData (stage 0). It takes its identity number to be nTransputers, and increments nTransputers by one, where nTransputers is the number of transputers found so far (the third element of loadingData).
At this point, transputer B enters stage 3 of the program, and acts simply to pass on messages from C, even though it has not yet checked links 2 or 3. While transputer C explores its environment, B does not attempt to timeout link 1. Let us suppose that C is not connected to any other transputers. Having failed to find any neighbours, transputer C returns control to B, by sending the token ReturnControl.t, together with the latest number of transputers found so far. Transputer C then enters stage 4, and since it has tried all of its links, takes no further part in the exploration. B sets downLoad[1] to TRUE, to note that a transputer has been loaded from this link.
Transputer B now returns to stage 1 of the program, and similarly tries link 2, and finally link 3. When all links have been tried, B returns control to A, together with the number of transputers found so far. And so on ...
Because of the sequential nature of the algorithm, there is only ever one process actively testing its links. That transputer alone stores the correct value of nTransputers. This enables a unique identity number to be given to each transputer as the exploration proceeds.
If a transputer is booted on link parentLink, then the above algorithm may be expressed as follows :
SEQ
SEQ I = 0 FOR 4 downLoad[I] := FALSE nTransputers := LoadingData[2] id := nTransputers nTransputers := nTransputers + 1 SEQ I = 0 FOR 4 -- Try each link in turn IF I = parentLink SKIP TRUE SEQ stage := 1 waiting := FALSE badOut := FALSE ... Probe neighbouring transputer (set waiting) (i) ... Boot neighbour, and wait while worm explores (iii) LinkOut[parentLink] ! ReturnControl.t; nTransputers |
Note:
SEQ
OutputToken.t (LinkOut[I], 0(BYTE), Delay, badOut) -- (ii) OutputInt.t (LinkOut[I], MinInt, Delay, badOut) OutputInt.t (LinkOut[I], MinInt, Delay, badOut) OutputToken.t (LinkOut[I], 1(BYTE), Delay, badOut) OutputInt.t (LinkOut[I], MinInt, Delay, badOut) Clock ? time ALT LinkIn[I] ? token -- Value returned SEQ stage := 2 waiting := TRUE Clock ? AFTER time PLUS Delay SKIP |
Note how the return of the value MinInt indicates that a successful poke and peek has taken place (the boolean badOut also indicates that this transputer has output the peek and poke). waiting is now set to true, and the algorithm enters the next loop.
PROC OutputToken.t (CHAN OF ANY ToLink, VAL BYTE Token,
VAL INT Delay, BOOL stopping) INT time : TIMER Clock : VAL [1]BYTE String RETYPES Token : IF stopping SKIP TRUE SEQ Clock ? time time := time PLUS Delay OutputOrFail.t (ToLink, String, Clock, time, stopping) : |
SEQ
... Try to boot neighbouring transputer WHILE waiting -- worm explores branch off neighbour LinkIn[I] ? token CASE token ... LoadingData.t (iv) ... ReturnControl.t (v) |
Booting is performed as follows:
VAL []BYTE InitialData RETYPES [Id, I, nTransputers, 0] :
VAL Program IS [programTable FROM 0 FOR programLength] : SEQ OutputString.t (LinkOut[I], Program, Delay, badOut) OutputInt.t (LinkOut[I], SIZE Program, Delay, badOut) OutputString.t (LinkOut[I], Program, Delay, badOut) OutputInt.t (LinkOut[I], LoadingData.t, Delay, badOut) OutputString.t (LinkOut[I], InitialData, Delay, badOut) |
Although we know, from peeking and poking, that there is a transputer waiting to be booted off this link, it helps debugging to use the output or fail routines again here!
LoadingData.t
[LoadingDataLength]INT passOnData : SEQ LinkIn[I] ? passOnData LinkOut[parentLink] ! LoadingData.t; passOnData LinkIn[parentLink] ? token -- Synchronise.t LinkOut[I] ! Synchronise.t stage := 3 |
ReturnControl.t
SEQ LinkIn[I] ? nTransputers downLoad[I] := TRUE waiting := FALSE |
Error reporting will be described in the next section.
The searching procedure is initiated by PROC WormHandler booting the first transputer in the tree, and telling it that nTransputers = 0. When that transputer finally returns control to WormHandler, the total number of transputers in the network will be returned, and the network will have been completely searched.
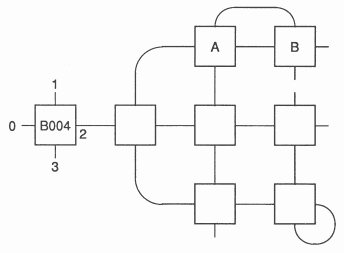
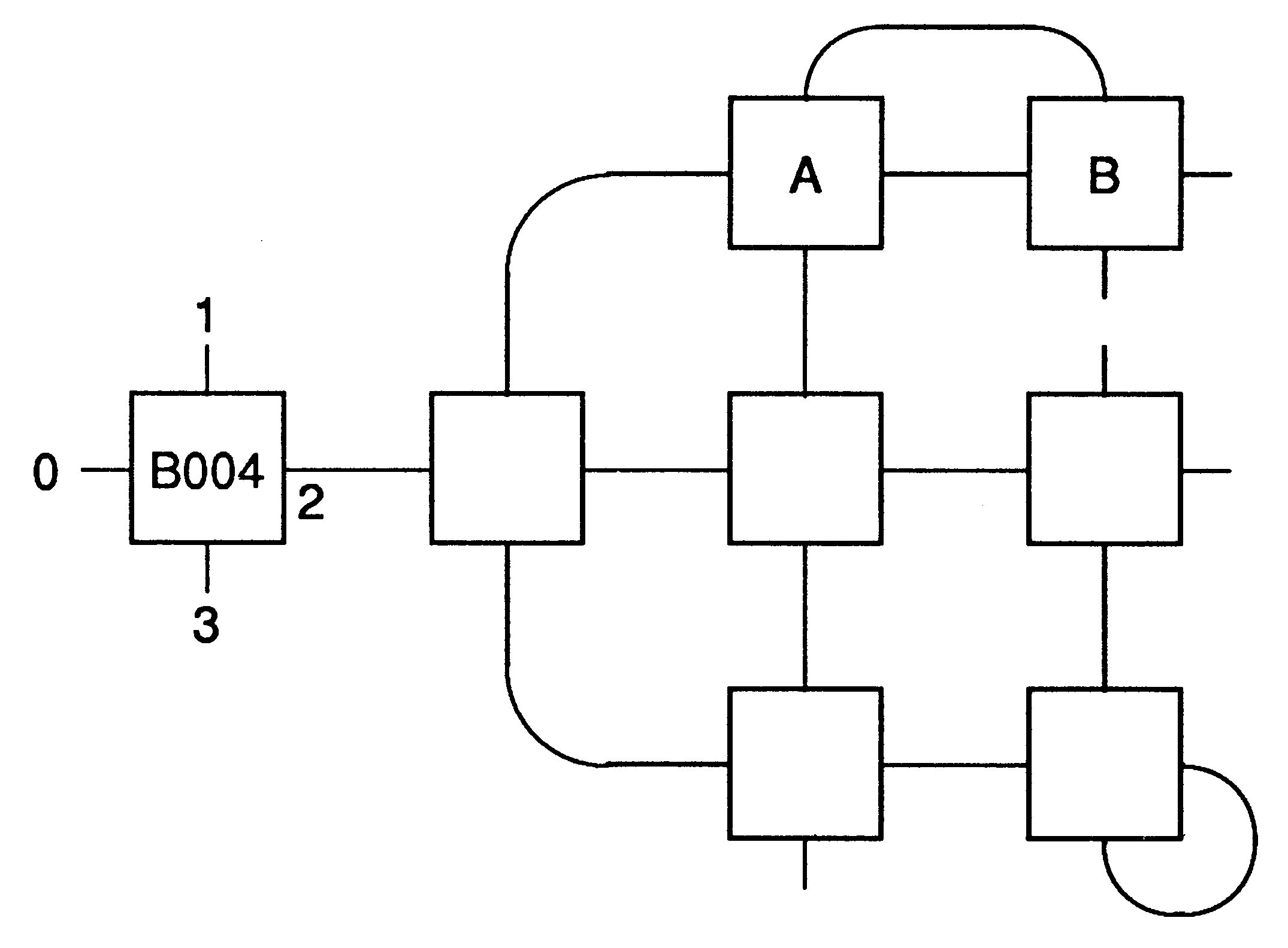
The algorithm described in the previous section would be quite satisfactory if all networks took the form of a tree. However, they are usually more complicated, in that they may have either or both (i) two links connected on the same transputer, and (ii) there are closed loops of connections involving more than one transputer. The network will still have a unique start point, however, namely the host transputer. An example is shown in figure 4.
The basic algorithm is as before, but in addition there is the situation where a link is connected back to a transputer which has already been booted. This is handled by arranging for every transputer to ’listen’ on all links which have not yet been tried - using a replicated ALT construct.
Suppose, for example, that link 2 of transputer A has booted transputer B on link 0, and is now passively waiting while B explores further. B outputs the poke and peek sequence on link 1, which arrives back at link 1 of transputer A. It must now be arranged that A will recognise this sequence, even though it comes in on a different link to the one on which daughter B was booted. So A inputs the whole message, and returns a token AlreadyLoaded.t, which has a value different from MinInt, in order to be recognised by B.
In order that A does not try link 1 again later, a boolean tryLink[I] is maintained (initialised to true), indicating whether to try probing off link I. In our example, tryLink[1] is set to FALSE.
It is also useful at this stage to build up a map of which links are connected to whom. A table, [4][2]INT linkArray, is assembled for each transputer, in which each link has a corresponding entry giving the identity of the neighbour attached to that link (if any), and that neighbour’s link. For example,
linkArray[3] := [6,0]
|
would be set to indicate that link 3 is connected to link 0 of transputer 6. When a parent boots a daughter, this information is communicated in the loadingData, and may be entered into the table as appropriate. However, when a transputer probes another one which is already loaded, the programs running on each transputer must exchange identities and link numbers, storing the information in linkArray.
The central part of the program now looks like this:
SEQ
... Initialise downLoad, id, nTransputers as before ... Initialise tryLink, linkArray (i) SEQ I = 0 FOR 4 IF NOT tryLink[I] SKIP TRUE ... Abbreviations as before SEQ ... Initialise as before ... Probe neighbour (ii) ... Boot neighbour, and wait for reply (iv) tryLink[I] := FALSE LinkOut[parentLink] ! ReturnControl.t; nTransputers |
Note:
SEQ I = 0 FOR 4
tryLink(I] := TRUE tryLink[parentLink] := FALSE linkArray[parentLink] := [loadingData FROM 0 FOR 2] |
PAR
... Probe neighbouring transputer SEQ Clock ? time ALT ALT J = 0 FOR NLinks (J <> I) AND tryLink[J] & LinkIn[J] ? probeString SEQ linkArray[J] := [id, I] linkArray[I] := [id, J] tryLink[J] := FALSE LinkIn[I] ? token CASE token ... MinInt as before ... AlreadyLoaded (iii) ... ELSE -- error (vi) ... Time out as before |
PAR
LinkOut[link] ! [id, link] LinkIn[link] ? linkArray[link] |
SEQ
... Try to boot neighbouring transputer as before WHILE waiting SEQ Clock ? time ALT ALT J = 0 FOR NLinks (J <> I) AND tryLink[J] & LinkIn[J] ? probeString ... Reply ’AlreadyLoaded.t’ (iii) LinkIn ? token CASE token ... LoadingData.t (v) ... ReturnControl.t (as before) ... ELSE -- error (vi) ... Time Out (vii) |
IF
stage = 2 linkArray[I] := [passOnData FROM 2 FOR 2] TRUE SKIP |
SEQ
waiting := FALSE linkArray [I] := [stage, Token rror.v] |
Clock ? AFTER time PLUS Delay
SEQ linkArray[I] := [stage, TimeOutError.v] waiting := FALSE |
Having explored the local connections of each link on a transputer, and returned control to the parent, we wish to relay the information linkArray back to the host transputer. This is done as follows:
CHAN OF ANY ToParent IS LinkOut[parentLink] :
SEQ stage := 4 ToParent ! NetworkData.t; id; linkArray SEQ I = 0 FOR 4 IF NOT downLoad[I] SKIP downLoad[I] -- Pass on network info from daughter processes SEQ reading := TRUE WHILE reading SEQ LinkIn[I] ? token CASE token ... NetworkData.t (i) ... NoMoreData.t (ii) ... ELSE (iii) ToParent ! NoMoreData.t |
Note:
NetworkData.t -- pass on id and info
INT passOnId : [4][2]INT passOnLinkArray : SEQ LinkIn[I] ? passOnId; passOnLinkArray ToParent ! NetworkData.t; passOnId; passOnLinkArray |
NoMoreData.t
reading := FALSE |
ELSE
SEQ reading := FALSE linkArray[I] := [stage, TokenError.v] ToParent ! NetworkData.t; id; linkArray |
Data from each transputer, giving the id. number and local link connections, will arrive back at WormHandler after the entire network has been loaded.
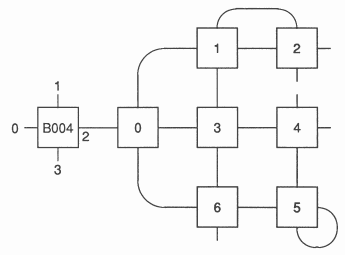
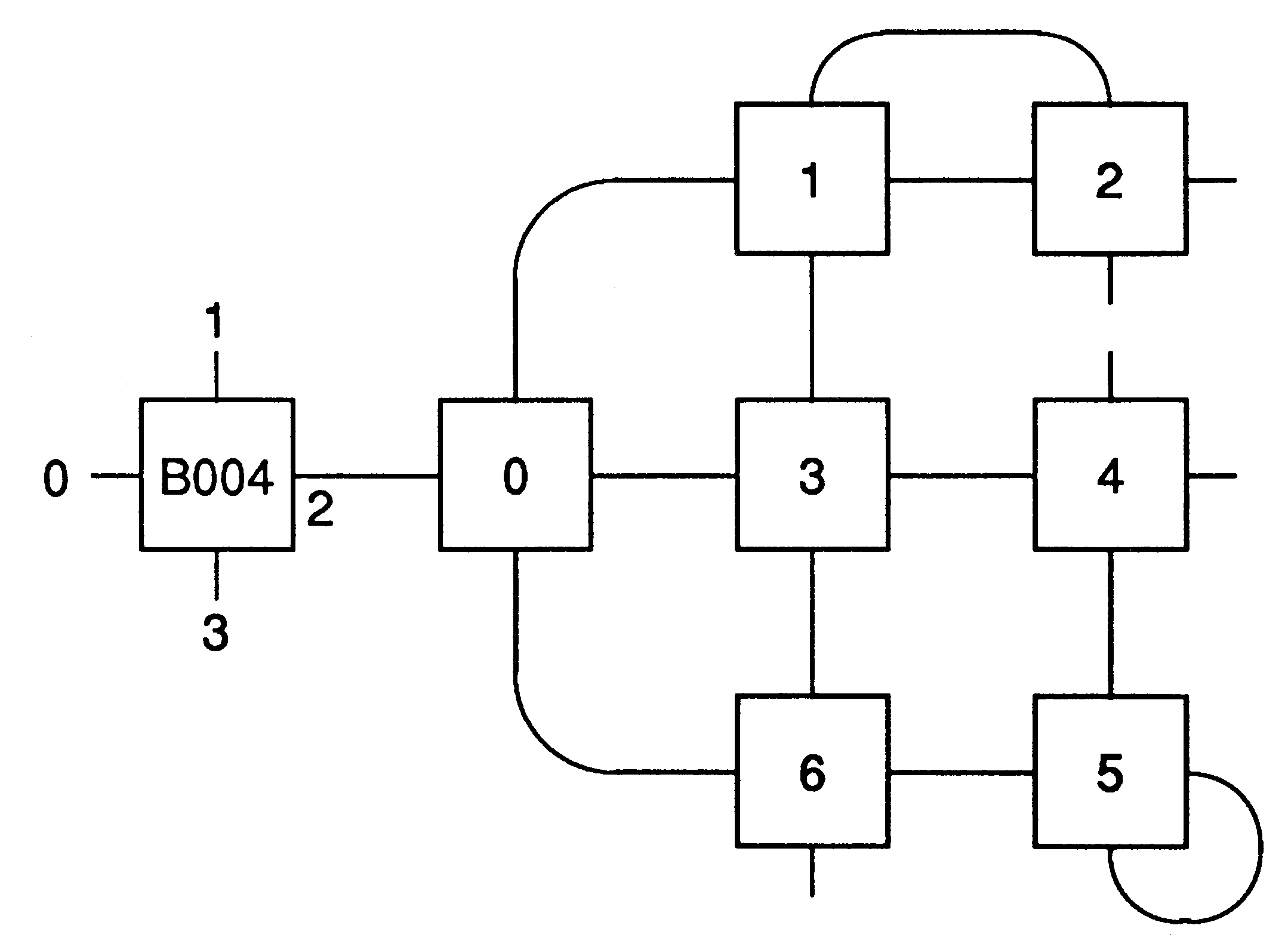
Below is some typical output from an exploratory worm program when run on the transputer configuration shown in figure 5:
Checking network off link 2 ...
Parent Daughter Id Link Id Link host 2 0 0 0 1 1 0 1 1 2 1 1 3 3 1 3 2 4 0 4 3 5 1 5 0 6 2 The number of transputers found is 7 Arranged in the following network : Id Link: 0 1 2 3 0 host-2 1-0 3-0 6-0 1 0-1 2-1 2-0 3-1 2 1-2 1-1 ooo ooo 3 0-2 1-3 4-0 6-1 4 3-2 ooo ooo 5-1 5 6-2 4-3 5-3 5-2 6 0-3 3-3 5-0 ooo |
The first table refers to the initial loading of the network. It indicates that link 2 of the host transputer (running on a B004, for example) has booted transputer 0 by link 0. Then link 1 of transputer 0 booted transputer 1 by link 0, and so on.
The second table summarises the connectivity of the network, by stating what each link of each transputer is attached to. For example, the entry 6-0 in row 0, column 3, indicates that link 3 of transputer 0 is attached to link 0 of transputer 6.
This section will note some further developments which can be made to an exploratory worm program, and restrictions on such a program.
The instruction set of the INMOS transputer is independent of the wordlength of the transputer on which it is to run. Code compiled for the IMS T414 may be run on a T800, or T212, for example, provided the following points are observed:
Internal communication of words should be treated similarly. For example, the input of a word, when compiled for a 32-bit machine, always attempts to input explicitly 4 bytes - which is not what is wanted if the program is to be run on a 16-bit machine.
Beware that, if INT32 words are specified in a program which is compiled for a 32-bit transputer, they will be recognised as being of the natural wordlength of the machine, and no special treatment will be given. If the same code is run on a 16-bit machine without recompilation, the data would be treated as 16-bits, which would be catastrophic if it was intended to communicate a 32-bit word.
ToLink ! #00; #00; #80; #00; #80;
#01; #00; #80 -- (i) ToLink ! #00 -- (ii) ToLink ! #00; #00; #00; #00; #80; #00; #00; #00; #80; #01; #00; #00; #00; #80 -- (iii) |
(i) is a sequence for poking and peeking a 16-bit transputer, (ii) rounds this off to a valid 32-bit poke (but at an address in external memory, which is not guaranteed to exist) and (iii) is a sequence for poking and peeking a 32-bit transputer. Words have been expressed as bytes, little end first, to prevent any possible confusion over compiling 16 and 32-bit words. If the neighbour is already loaded, it should be made to reply immediately it receives probe (i).
[2][ArraySize]BYTE dummyArray :
[ArraySize]BYTE array IS dummyArray[0] : |
The same applies for boolean and INT16 arrays.
An exploratory worm program is an extremely useful vehicle for testing transputer based products. Tests for memory and the links may be included in the basic program, for example. If a hardware fault occurs, the program may report the location and nature of the problem, while continuing to test other components in the network. This is particularly useful during a long burn-in run. By testing the network repeatedly with an exploratory worm, any failure may be detected and logged, while the rest of the network continues to be burnt-in.
All INMOS transputers and transputer evaluation boards are burnt-in before shipping, and subsequent failure is unlikely. However, this technique may be useful for testing products which use transputers as components. In designing an exploratory test program, the following points should be borne in mind:
Another field in which it is useful to have a vehicle to load an arbitrary network is when the user intends to run a program replicated over an array of processors, but does not care too much about their precise configuration. An example of this is the data farm approach to processing [5]. In this, one central processor ’farms out’ work to an array of ’worker’ processes, each of which is capable of processing a piece of data and returning it. The following points should be made:
A more flexible system can be constructed by arranging that the worm declares a large workspace. After the system has been explored, the host sends out processes, in the form of pieces of compiled code, to specified processors in the network, which are run using KERNEL. RUN. This allows the placement of code to be decided at run-time, which might be useful, for example, in constructing a program which takes advantage of all the processors in an arbitrary network, or to be used as a basis for a multi-tasking operating system.
By its very nature, a worm program is difficult to debug. While the INMOS software debugger is very useful for debugging a program which has been configured to match a known multiprocessor configuration, it does not deal with a program which has explored an unknown network. To make things simpler, let us assume that the program to be debugged is being run on a network of transputers whose configuration is actually known, and which is known to be free from hardware bugs.
Since the worm takes the form of a PROGRAM configured for one transputer, a bug which occurs on the first transputer in the network can be traced by using the debugger in the normal way - simply point it at the worm PROGRAM and it will give the values of all variables, channel communication, etc., and the point at which the program failed.
If a bug occurs deeper down in the network, use the following procedure. First modify the program so that it looks like this:
... SC Worm
CHAN OF ANY a,b,c,d,e,f,g,h : PROCESSOR 0 T4 ... PLACE a AT 0, b AT 1, etc. Worm (a,b,c,d,e,f,g,h) |
(The channels a, ... h are not used by the worm, but must be declared to ensure that code is placed in the same way as below.)
Now take a copy of this program, and configure it to match the actual network (or part of the network). For example, for a 2 transputer network connected by link 0 on each transputer:
... SC Worm
CHAN OF ANY a,b,c,d,e,f,g,h : CHAN OF ANY i,j,k,1,m,n : PLACED PAR PROCESSOR 0 T4 ... PLACE a AT 0, b AT 1, etc. as before Worm (a,b,c,d,e,f,g,h) PROCESSOR 1 T4 ... PLACE e AT 0, a AT 4, i AT 1, etc. Worm (e,i,j,k,a,l,m,n) |
Load the network by pointing the EXE at the Worm PROGRAM configured for one transputer, in the usual way. (A suspected software bug occurs which causes the program to fail...) Now point the debugger at the copy of the program configured to match the network. The debugger will give complete symbolic information about the state of the system when the program crashed.
Remember that, even if the failure is severe enough to cause the host transputer to lock up, so that it has to be rebooted, the state of the subsystem is not altered by rebooting, and it can still be debugged as above
It is always important that channels are declared and placed on hard links in the same way, no matter how the program is configured. This is to ensure that the way the code is loaded exactly matches the placement of the code for the configured program, as used by the debugger. If in doubt, use the ’check code’ feature of the debugger to check that placement of the code loaded on the transputer matches the configured program.
Section 4 described an algorithm for sequentially exploring a network. This is quite fast enough for most purposes. However, if a large program is to be loaded onto an extremely large network o f transputers, a parallel loading algorithm might be considered. Such an algorithm is not so simple as the one described above. In particular, it may happen that two loaded transputers simultaneously try to boot a third, unloaded transputer, which is connected to both of them. The following points should be noted:
[1] Transputer Development System, Prentice Hall, London 1988
[2] IMS B004 Evaluation Board User Manual, INMOS Ltd, Bristol
[3] Extraordinary use of transputer links, Technical note 1, INMOS Ltd, Bristol 1987
[4] Transputer Reference Manual, Prentice Hall, London 1988
[5] Communicating Process Computers, Technical note 22, INMOS Ltd, Bristol 1987