|
|
| IMS B005 Design of a disk controller board with drives _____________________________________________________________________ |
| Pete Moore February 1987 |
The INMOS transputer is a radical new approach to microprocessor design. To help potential users to understand its operation (and appreciate its performance) a range of evaluation boards have been produced. These allow fast ’hands-on’ experience of the transputer and occam, the concurrent programming language developed by INMOS to fully exploit the parallel processing inherent in the transputer architecture.
The IMS M212 is a 16 bit transputer with a complete on-chip disk controller; on-chip RAM provides up to five sector buffers and the on-chip ROM contains primitives needed for a disk operating system.
The IMS B005 is an extended double eurocard designed to fit into a card frame such as the INMOS transputer evaluation module (ITEM). It has two disk drives (a 20 MByte winchester drive and a 640 Kbyte floppy drive) as well as all the necessary buffering for up to two additional drives, thus relieving the user of the long and expensive task of initial hardware development.
|
|
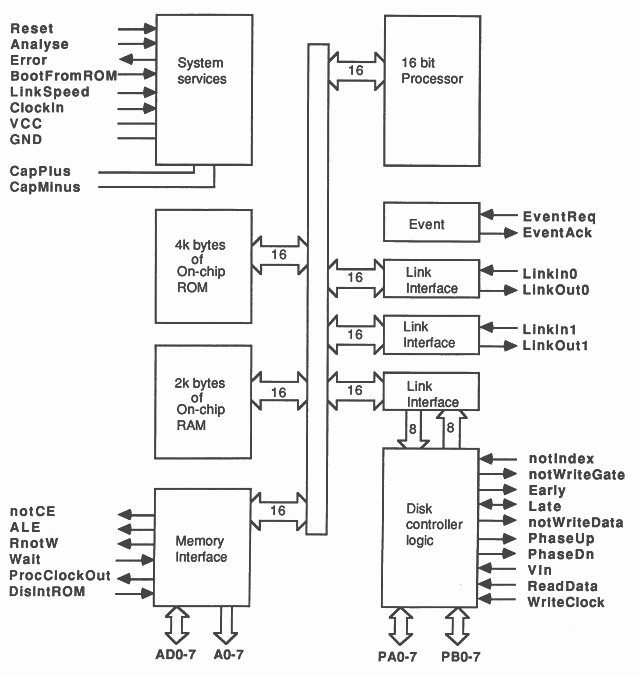
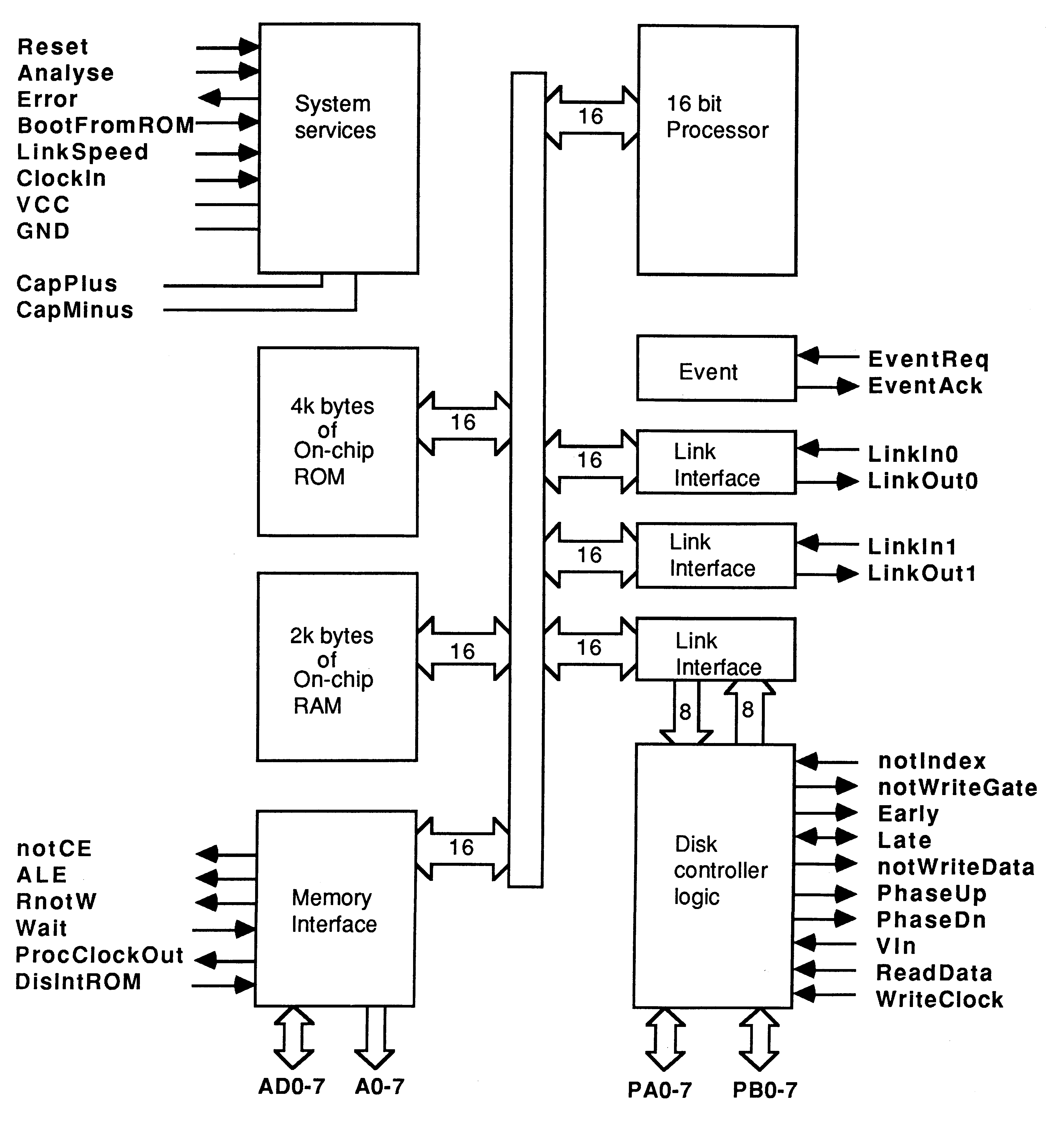
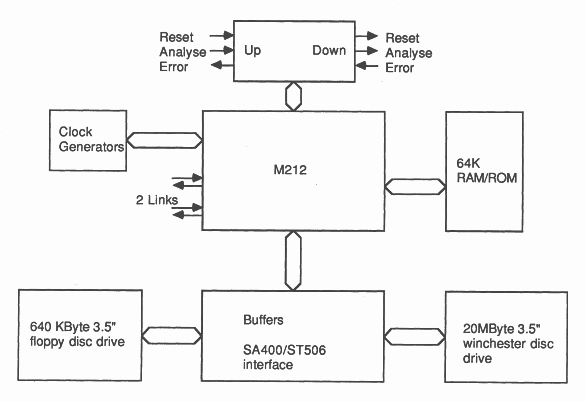
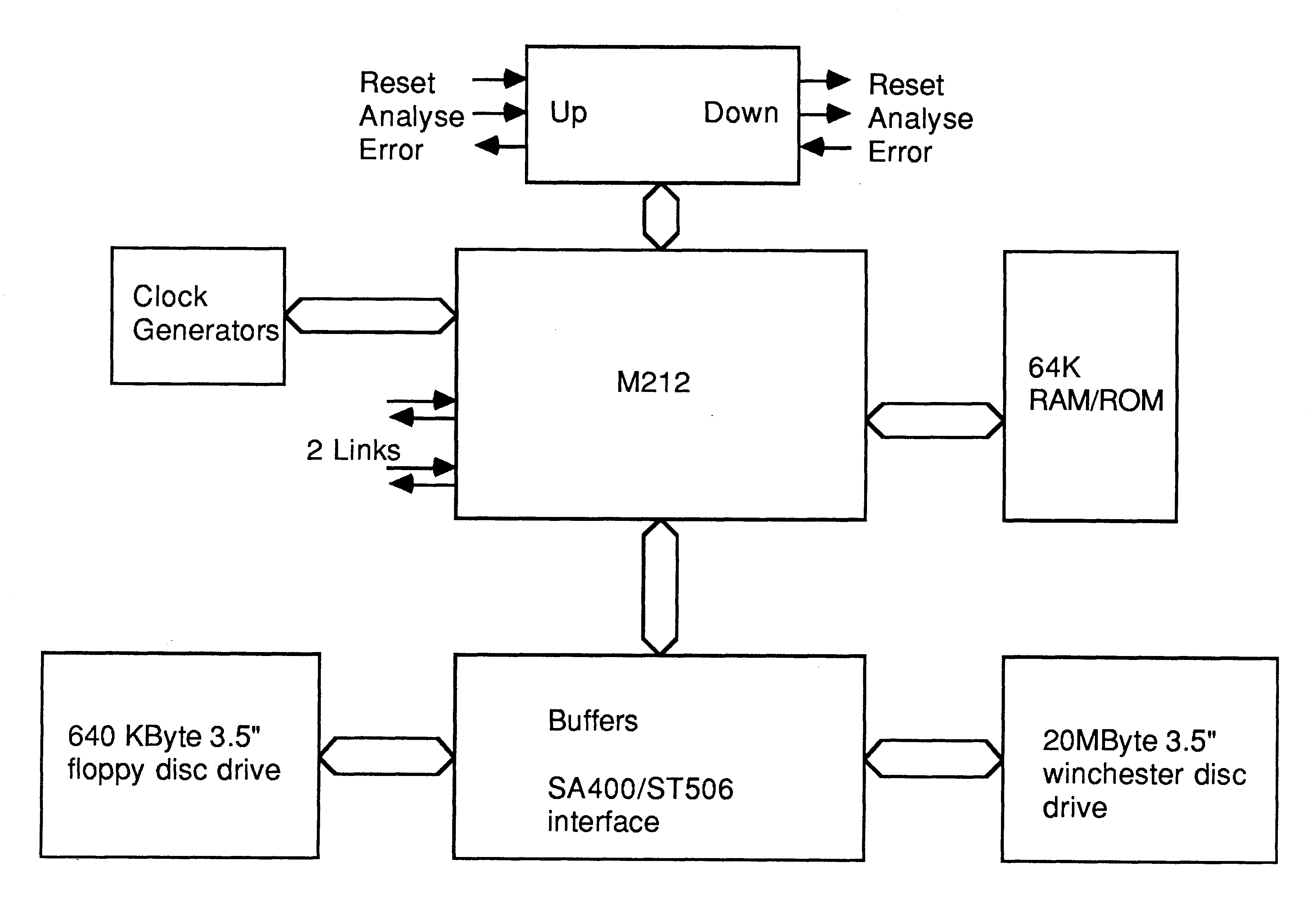
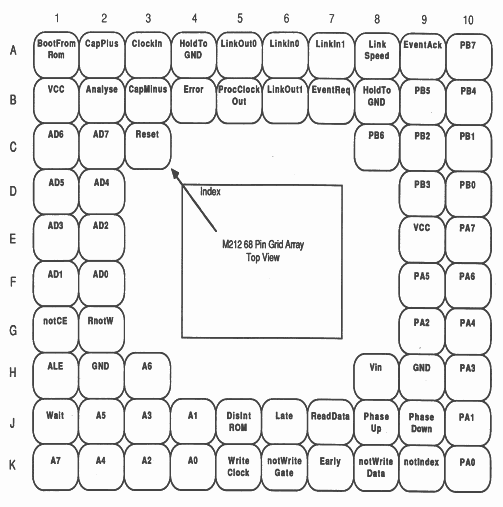
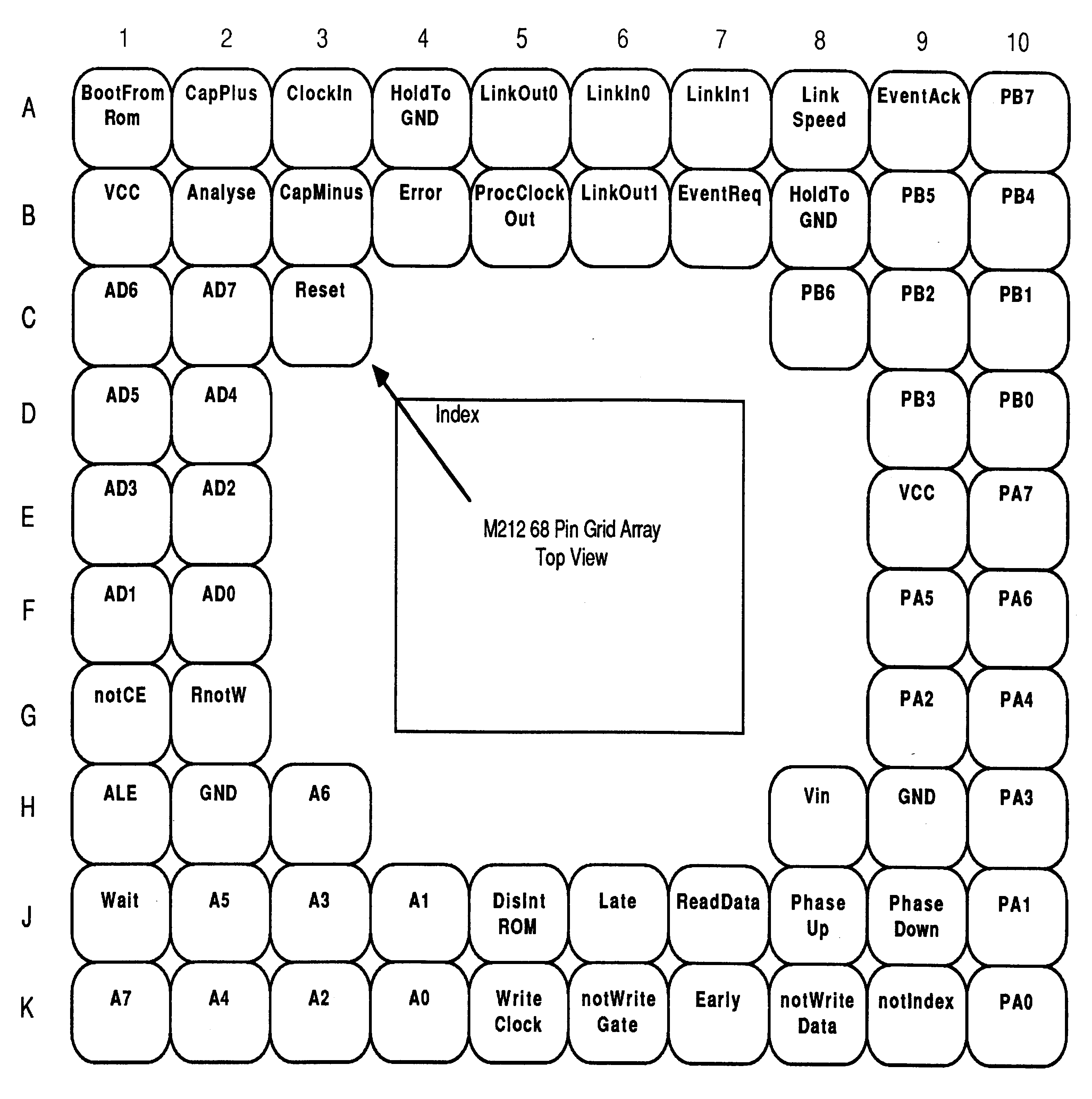
The IMS M212 transputer disk processor is a complete computer on a chip. It has a 16 bit processor (capable of 10 MIPS), 2 KBytes of fast (50ns cycle) on-chip static RAM, two INMOS serial communication links (for external communications), and a programmable external memory interface. In addition to this is a disk controller providing industry standard SA400/ST506 interfaces. The block diagram is shown in figure 1.
The 16 bit multiplexed address/data bus of the M212 allows up to 62 KBytes of byte organised memory, external to the transputer, as well as the 2 KBytes of fast static RAM on the transputer chip itself. The memory map of the M212 is signed, with the internal RAM starting at the most negative address ( Hex 8000 to Hex 87FF ). The external memory starts at Hex 8800. The internal ROM resides at the top of the positive address space ( Hex 7000 to Hex 7FFF), although it may be disabled if the user wishes to use external ROM.
The internal RAM is accessible in one processor cycle (50ns), the internal ROM in three processor cycles.
All transputer products communicate via INMOS links; these provide point-to-point, full duplex, serial communication using a simple handshake protocol (see reference 1). The link circuit uses a direct memory access (DMA) block transfer mechanism to pass data to and from the transputers memory, and runs concurrently with the processor, thus allowing processing to continue during a data transfer.
The M212 has two serial links for communication with other transputer products and one internal byte wide link to provide communication between the processor and the disk controller hardware. This byte wide channel appears to the processor as a normal link, but it transfers data to the disk controller in parallel, to increase bandwidth.
The disk controller is designed to connect to industry standard floppy and winchester disk drives with minimal external logic. It has two 8 bit programmable control ports and a 10 bit port for all of the special disk control signals. These are
| Vin |
| Phase Up |
| Phase Down |
| Early |
| Late |
| Read Data |
| notWriteData |
| notWriteGate |
| notIndex |
| WriteClock |
The two 8 bit ports are used to select drives and heads as well as detection of track0, writeprotect, writefault etc. The M212 is described in detail in the M212 product databook [2].
A full description of the transputer architecture and occam are given in reference [1].
The IMS B005 is designed to exploit all of the features of the M212. In this respect there are three main requirements :
The INMOS range of evaluation boards are mainly of the extended double eurocard form-factor (8.65” x 9.2”). To enable two drives to be fitted, 3.5” disk drives were used. Currently, a 3.5” winchester drive can store 20 MBytes, and a 3.5” floppy 640 KBytes, of formatted data.
The M212 has programmable I/O ports for selecting drives and heads, but for more than one drive it is necessary to buffer these signals.
External memory is provided in the form of two 32 KByte by 8 devices; these are selected by jumpers to be static RAM or EPROM. There is a wait state generator which is switch programmable to allow for memory devices of various access times.
Signals such as reset, analyse and error to control this and/or other similar boards in a larger system of transputers are controlled from a 96way DIN41612 connector which plugs into the back plane of an ITEM.
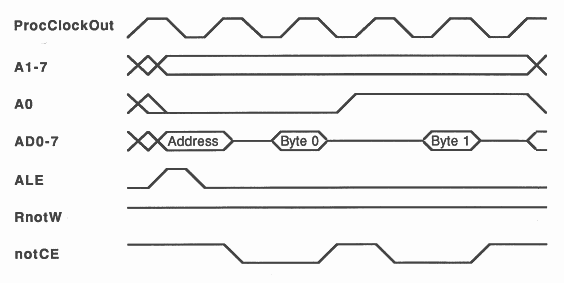
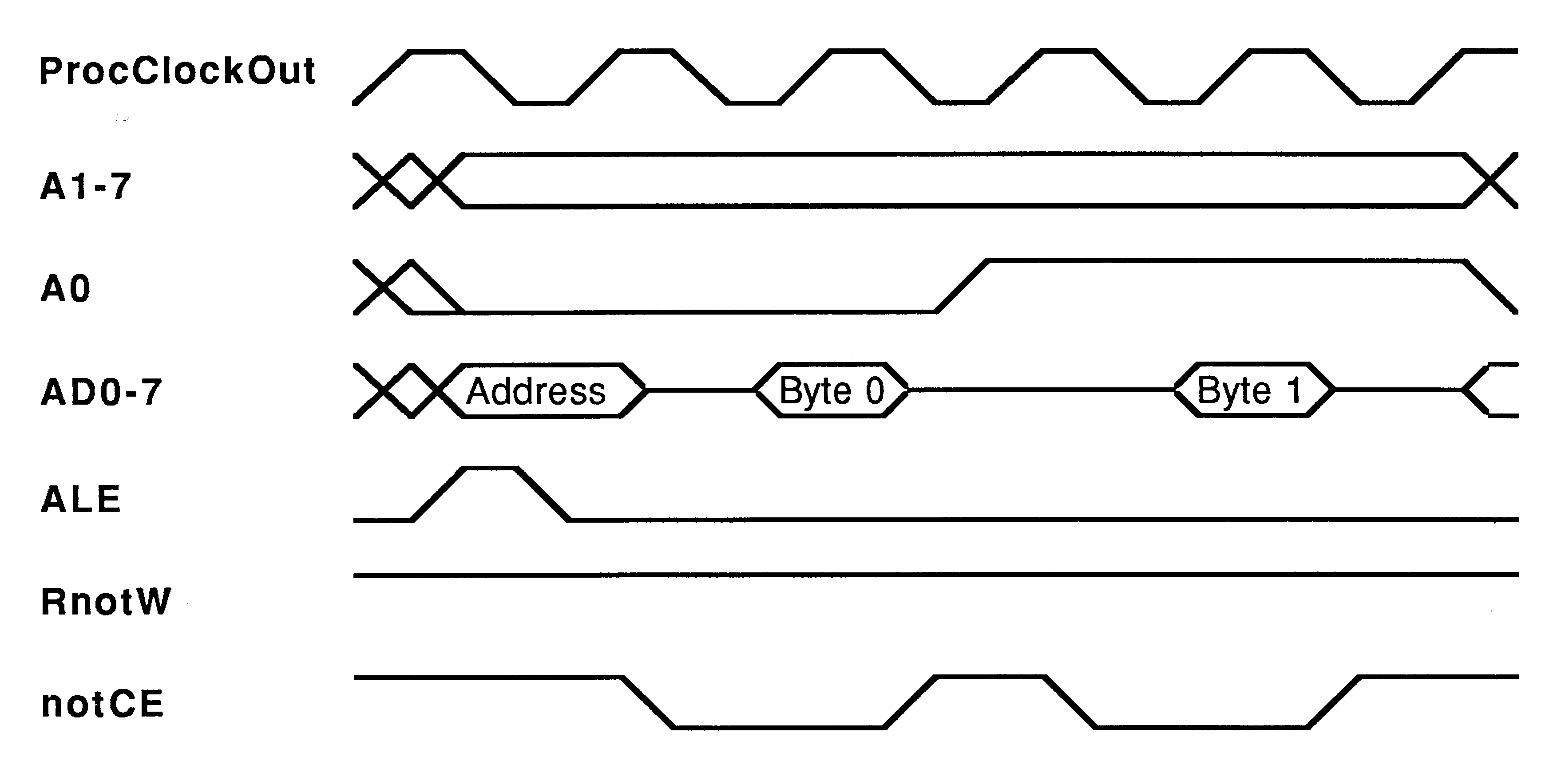
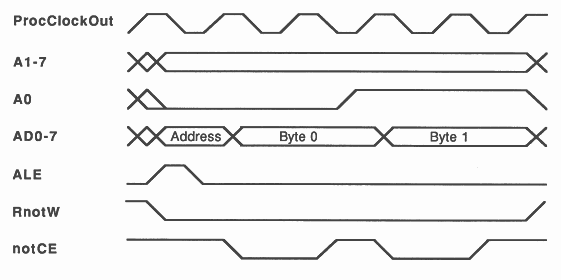
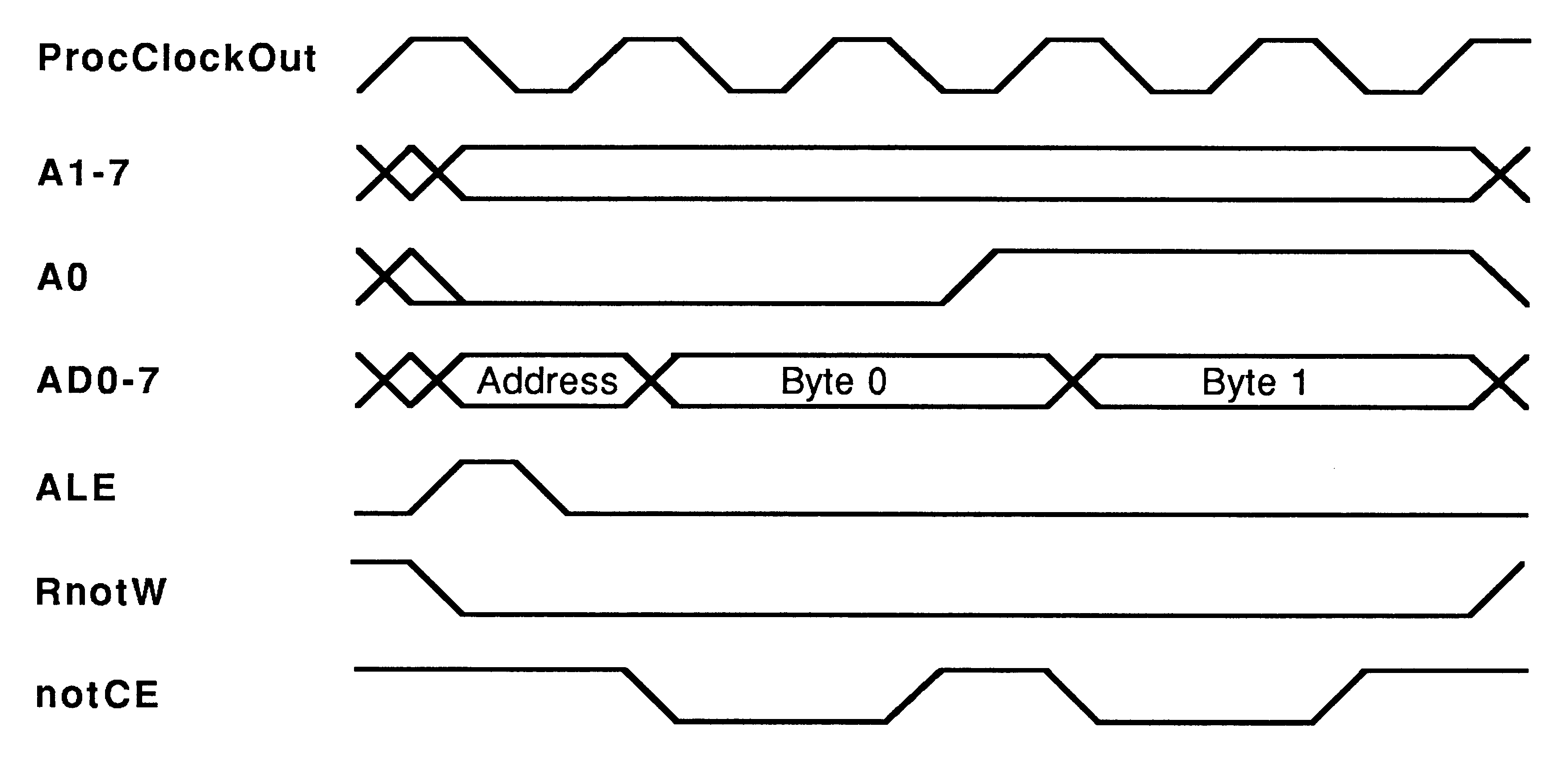
The M212 has a 16 bit address bus which can address up to 62 KBytes of external memory. The data bus is 8 bits wide and is multiplexed with the top 8 bits of the address bus. Word reads and word writes are performed in five processor cycles, as shown in figure 3 and figure 4.
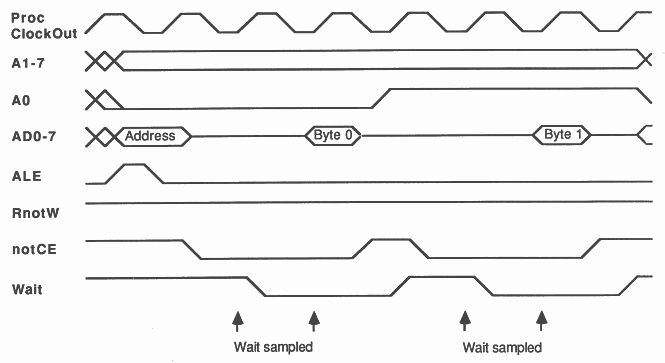
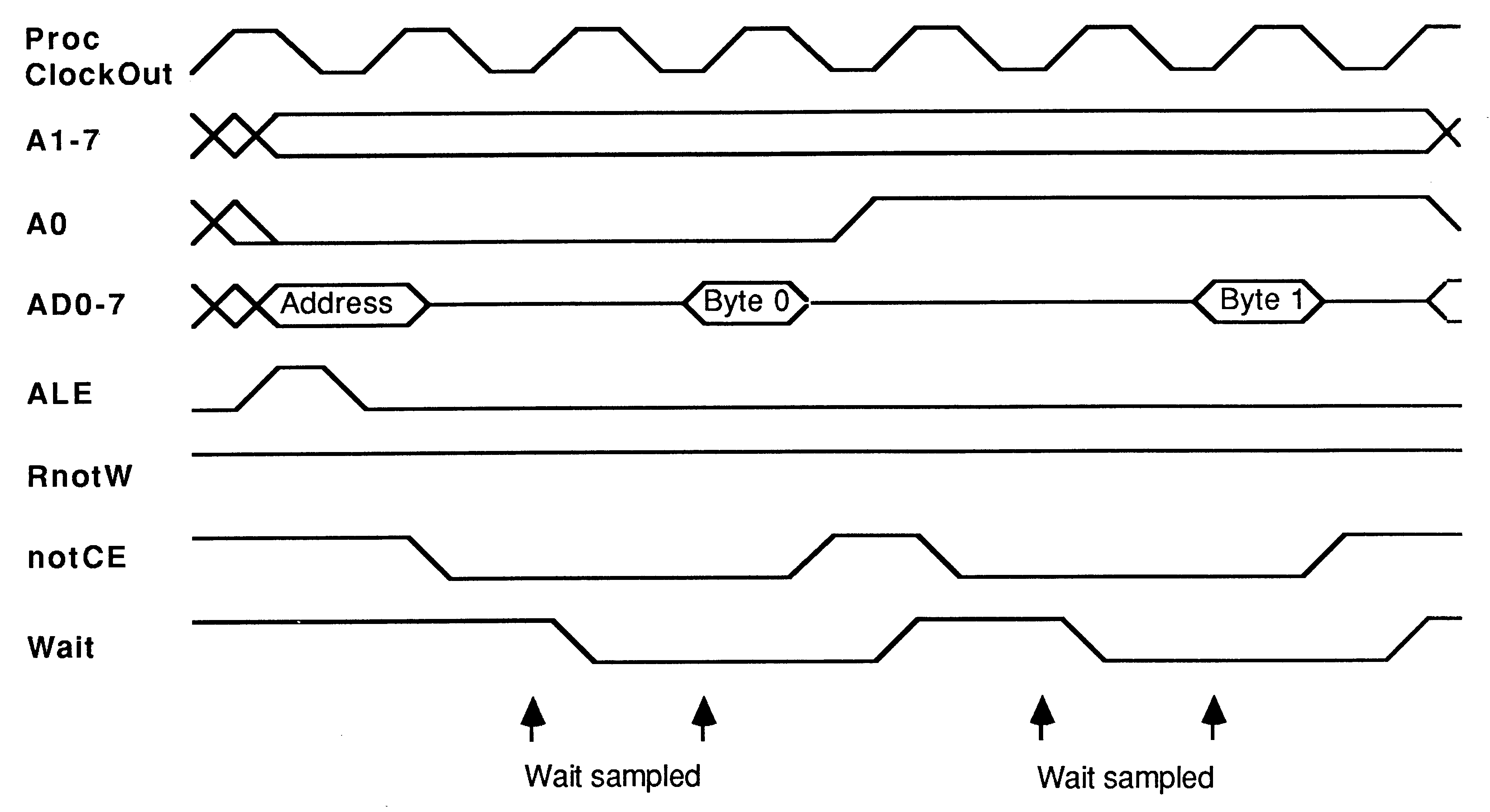
It is possible to extend the memory interface cycle by inserting extra clock periods. The memory wait pin is sampled as shown in figure 5, and the cycle will be extended if the wait input is high. When the wait input is sampled low, the cycle will continue.
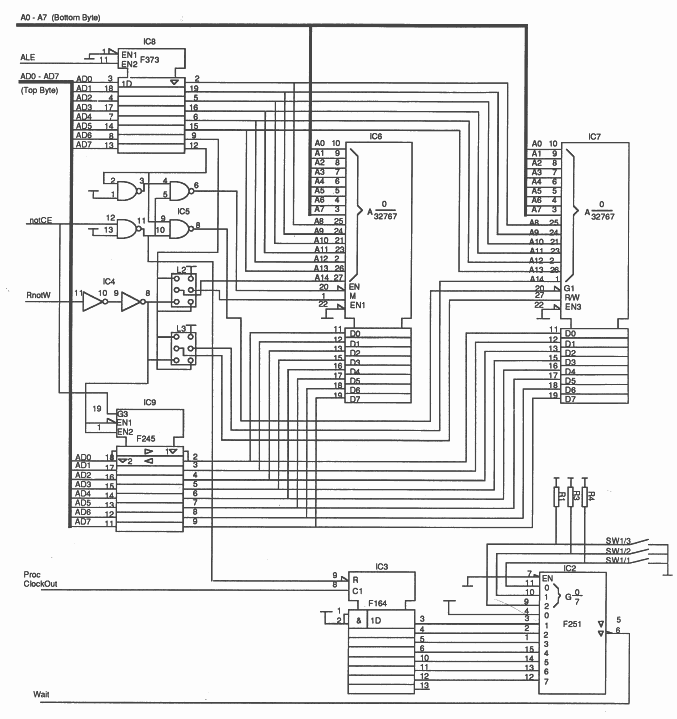
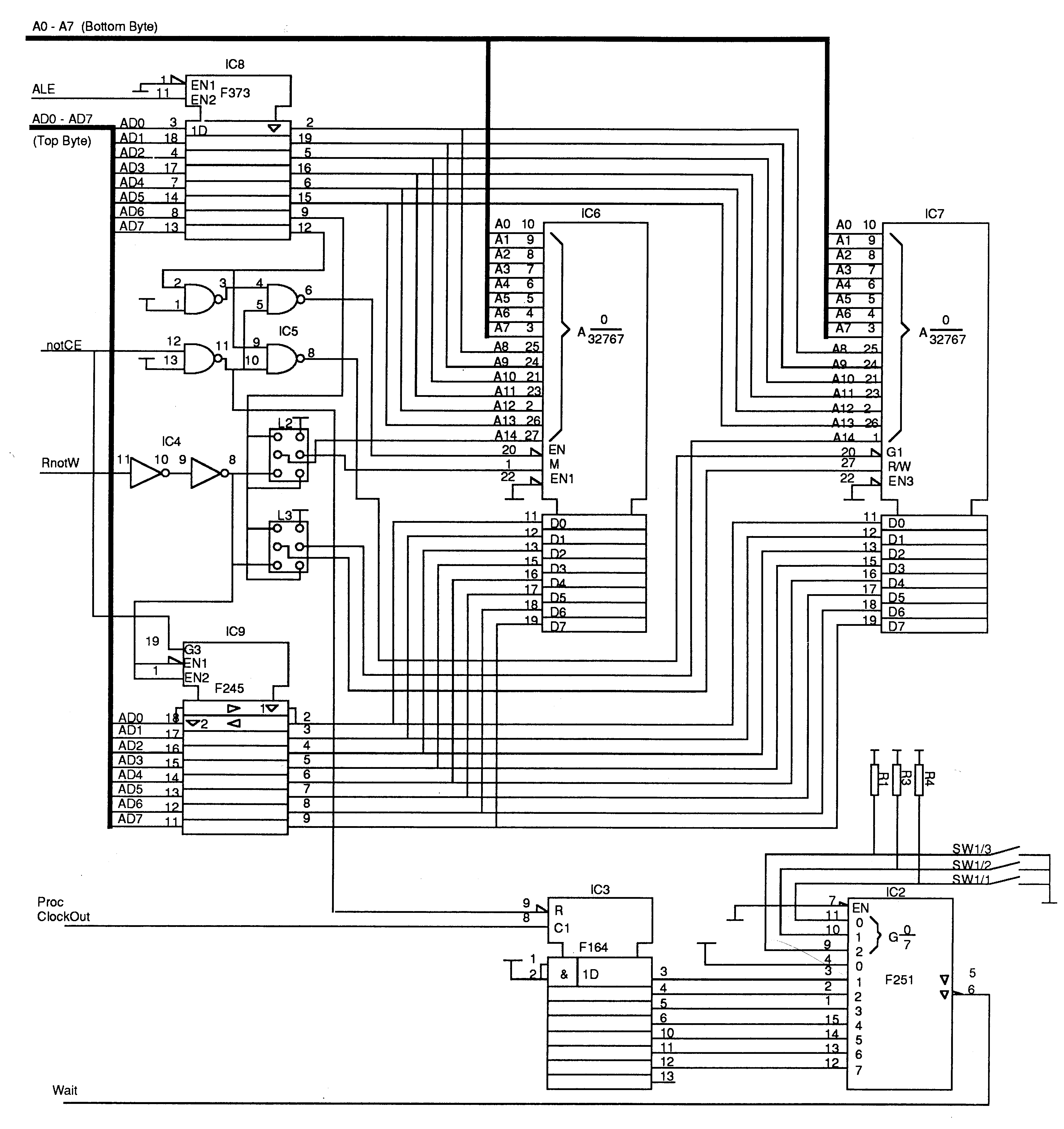
The circuit diagram of the memory is shown in figure 6.
The RAM devices supplied on the IMS B005 are Hitachi HM62256P-12; these have access times of 120ns It is also possible to use EPROM with this interface if the user wishes to supply a custom program; suitable devices are Hitachi HN27C256G-20, with access times of 200ns.
To enable these, and other manufacturers devices to be used, extra wait states may be inserted by setting switch 1 positions 1 to 3. These select 1 of 8 inputs to the multiplexor IC2; with all inputs low, the inverter multiplexor output (pin 6) is high and the memory interface must wait. The multiplexor inputs are driven by a shift register (IC3) clocked by ProcOlockOut; when its reset input goes high (inverse of notCE) the data (held permanently high) is shifted into the register. Depending on which multiplexor input is selected, it will take between 0 and 7 clock cycles for that input to go high, sending the inverted output low and thus deasserting wait. In this way any number of clock cycles between 0 and 7 may be inserted into the memory cycle at the points shown in figure 5.
The complete switch settings are given in figure 13; the correct access time may be obtained by simply adding the required number of clock periods. With such a simple circuit it is not possible to select a different number of wait states for top and bottom halves of memory; the interface must run at the speed of the slowest device being use.
The top byte of the memory address bus (AD0 - AD7) is latched by ALE (address latch enable) into the F373 (IC8), its output is permanently enabled. The bottom byte of the memory address bus (A0 - A7) connects directly to the memory devices.
The multiplexed memory data bus is driven by IC9 (F245). The direction is controlled by RnotW (buffered by IC4), and the output enable is driven by notCE.
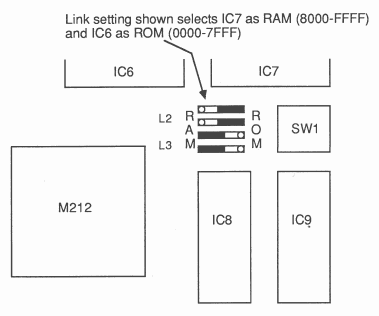
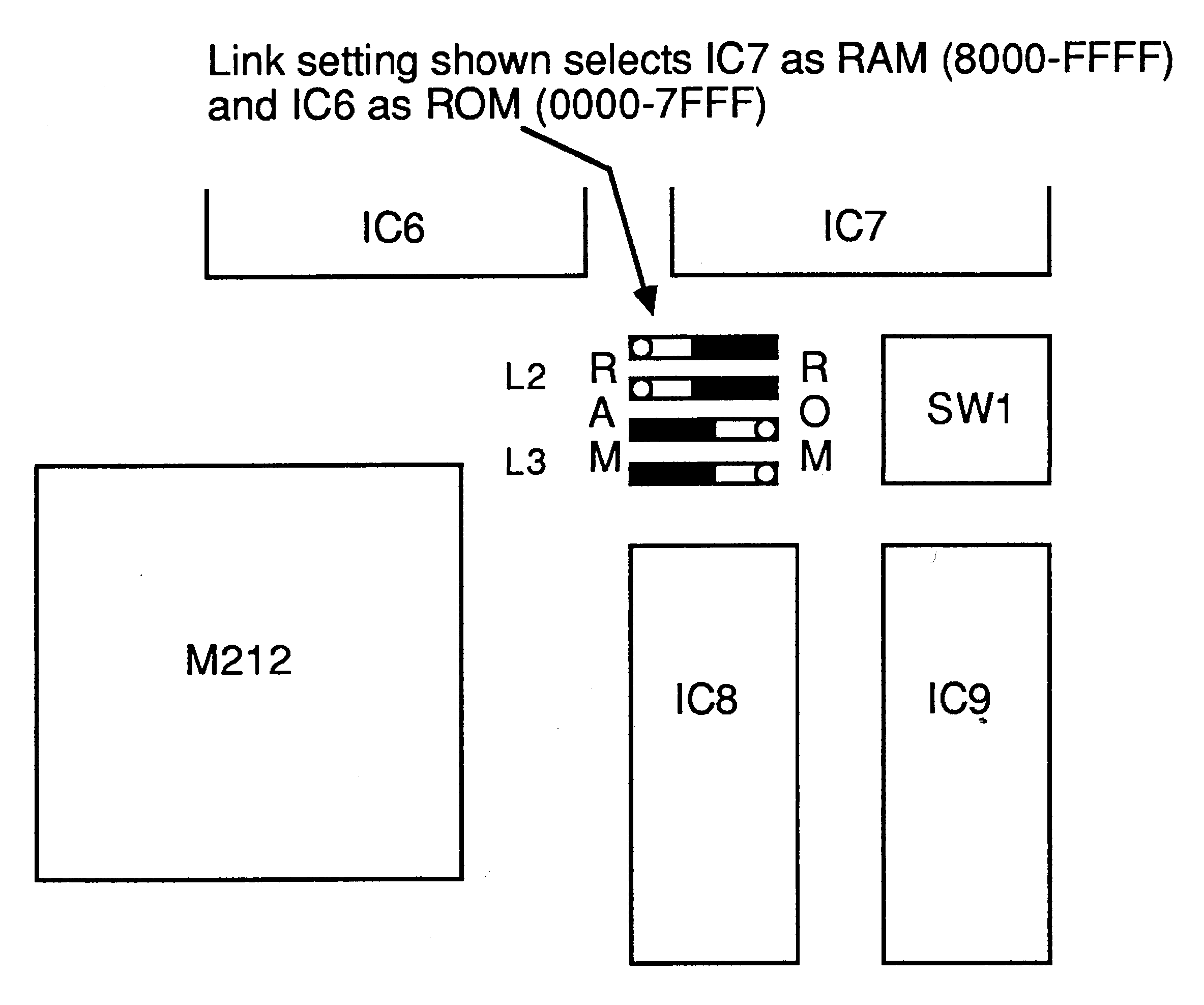
The two links L2 and L3 are used to select RAM or ROM (see figure 7). In the case of RAM AD6 is used as the most significant address bit, for ROM RnotW is used for this purpose.
IC6 is mapped into the positive half of memory by IC5, which propagates notCE when AD7 is low (the enable pin of the memory device is active low). IC7 is fed notCE when AD7 is high, so appears in the negative address space.
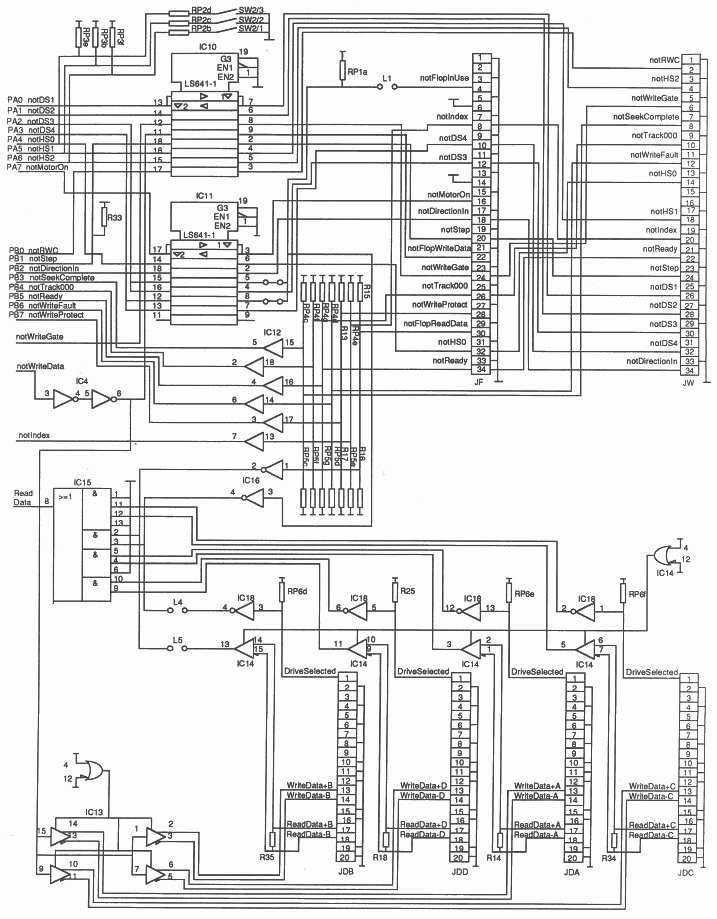
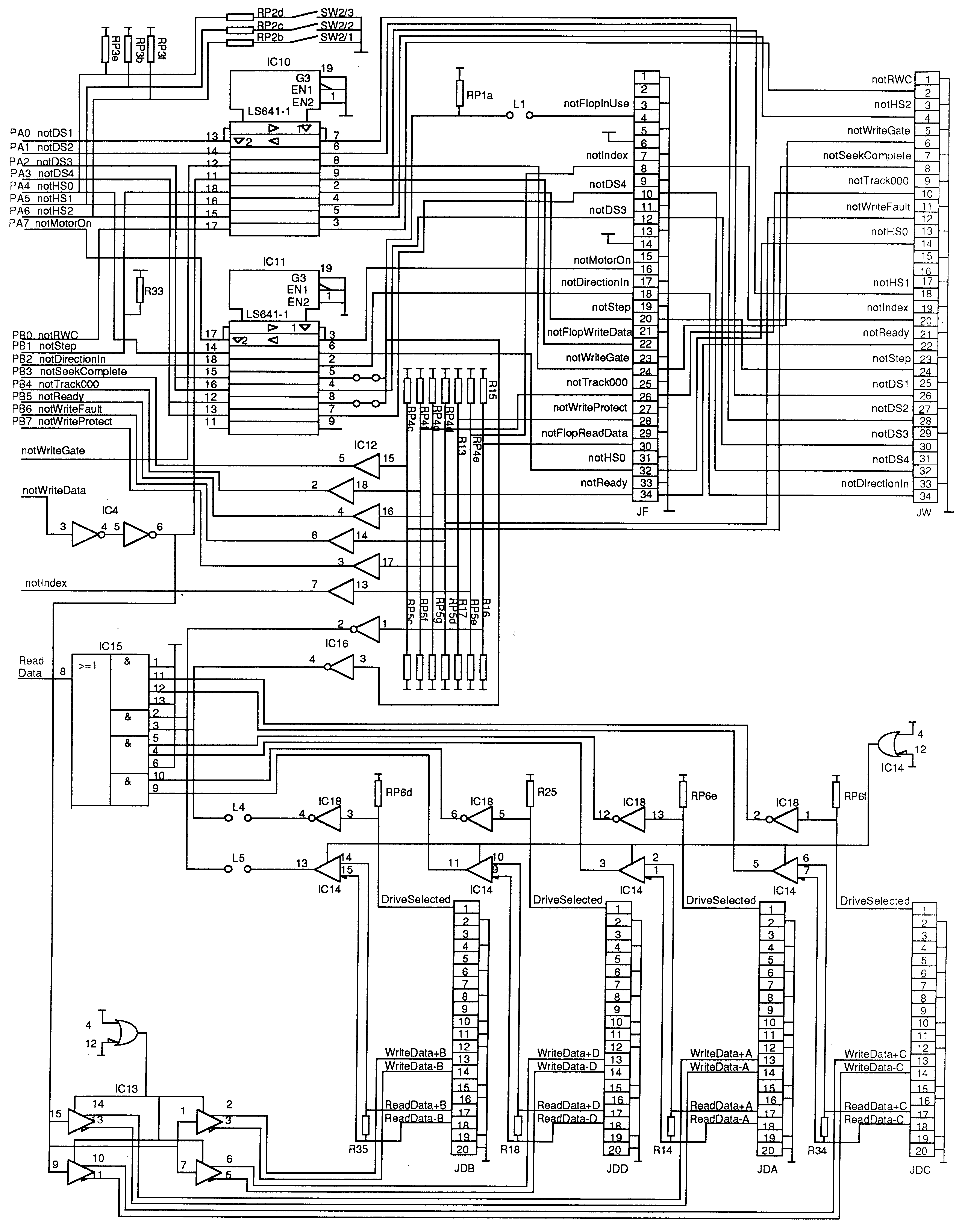
The disk drive interface is shown in figure 8.
When using more than one floppy disk drive it is standard practice to daisy-chain the signal connectors, terminating the end of the chain. For this reason only one floppy connector (JF) has been provided, although it is possible to control up to four floppy drives if required. Similarly, winchester disk drives have a control port which is daisy chained, hence the single winchester control connector, JW. In addition to this there are four winchester data connectors (JDA to JDD); these connect to one drive each, and are individually terminated inside the drive.
The two 8 bit I/O ports have been assigned to various disk control functions in the on-chip program. Signals that are outputs to the drives are buffered by IC10 and IC11, which are 74LS641-1. Inputs are buffered by IC12, a 74LS645-1. If the M212 is being used to control only a single drive, there is no need to buffer these signals.
There are three switches SW2/1 to SW2/3, shown above IC10 in figure 8. Their function is to enable the M212, on reset, to examine PA4 to PA6 and then boot from floppy or winchester accordingly. The signal lines are held high by resistors (RP3) and pulled low by the switches and resistors (RP2). This arrangement does not compromise signal levels when PA4 to PA6 are used as outputs (in normal use).
The notWriteData signal is buffered by IC4 (and again by IC10 for floppy data) and fed to IC13; this device is a quad differential driver providing balanced signals to each of the four data connectors. The read data from each of the four data connectors is converted to TTL signal levels by the differential receivers of IC14 before being gated by IC15. This device uses the inverted DriveSelected (active low) signals (notFlopInUse for the floppy data) to select the correct read data. Provision has been made for four winchester drives; if all four are to be used then IC16 must be removed and the two links L4 and L5, shown by IC15, must be made.
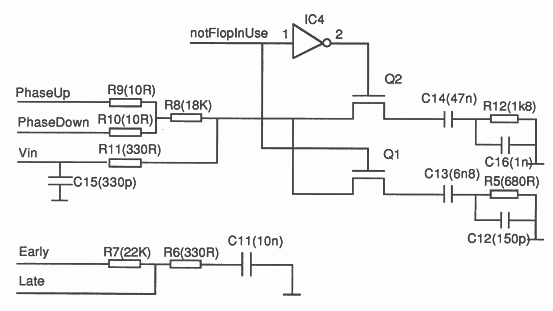
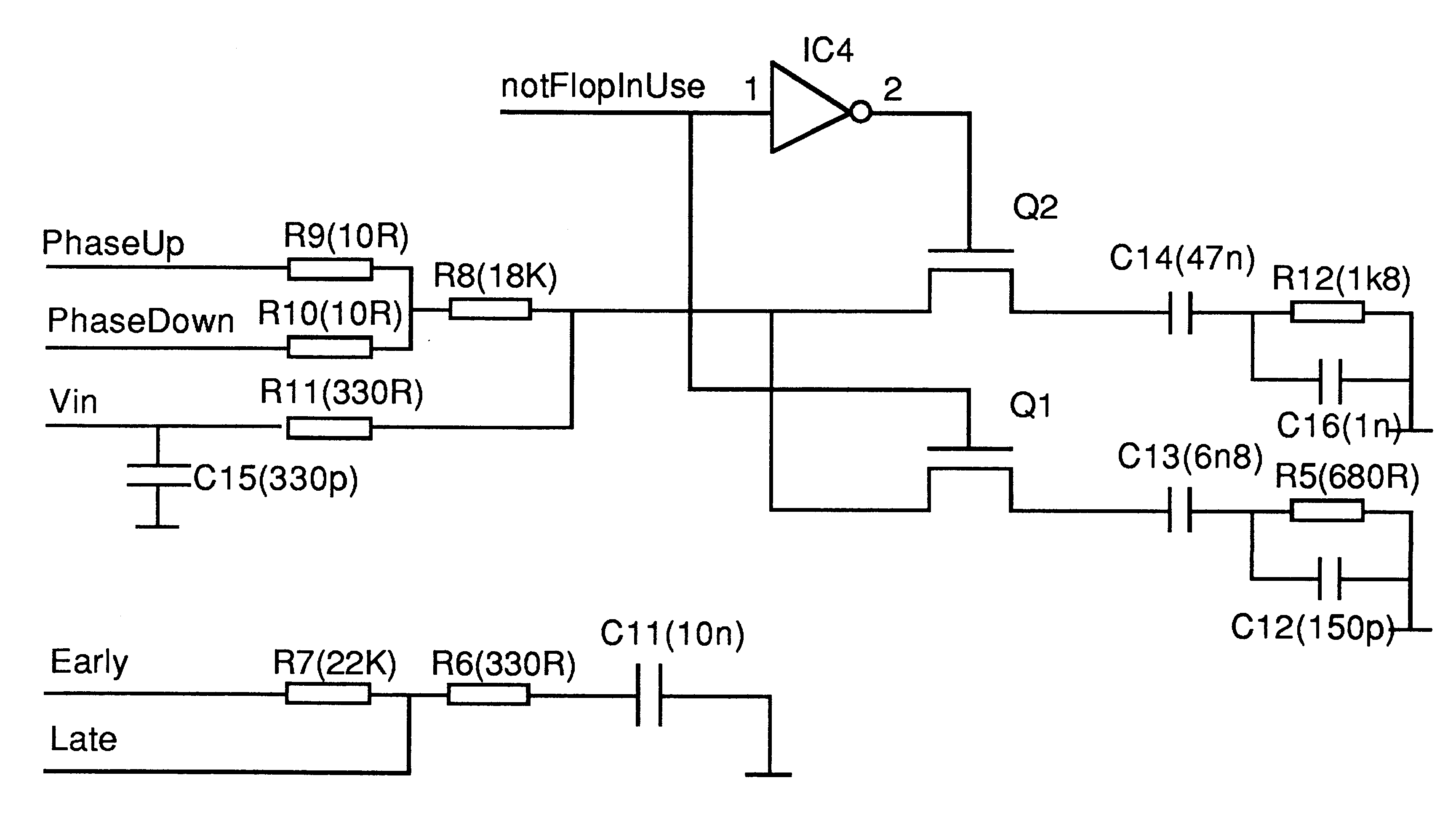
The M212 disk controller has, in addition to its processor clock PLL, two additional PLLs associated with the disk controller logic. These deal with data separation and write data precompensation:
In both cases, the filters required for the PLLs are off-chip to allow for different gain and phase characteristics needed at different data rates. A full description of the PLL filters is given in the M212 manual (reference 2) along with examples of filter component values.
The filters are shown in figure 9. As the winchester and floppy disks have different data rates, two filters are required, and these are switched in using two transistors, Q1 and Q2.
The board architecture, common to all INMOS transputer evaluation boards, allows any number of boards to be connected together to create a multi-processor system. On each board, the transputer links are brought to the edge connector, and cables are used to interconnect transputers on separate boards.
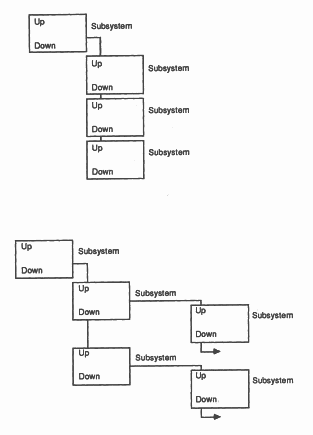
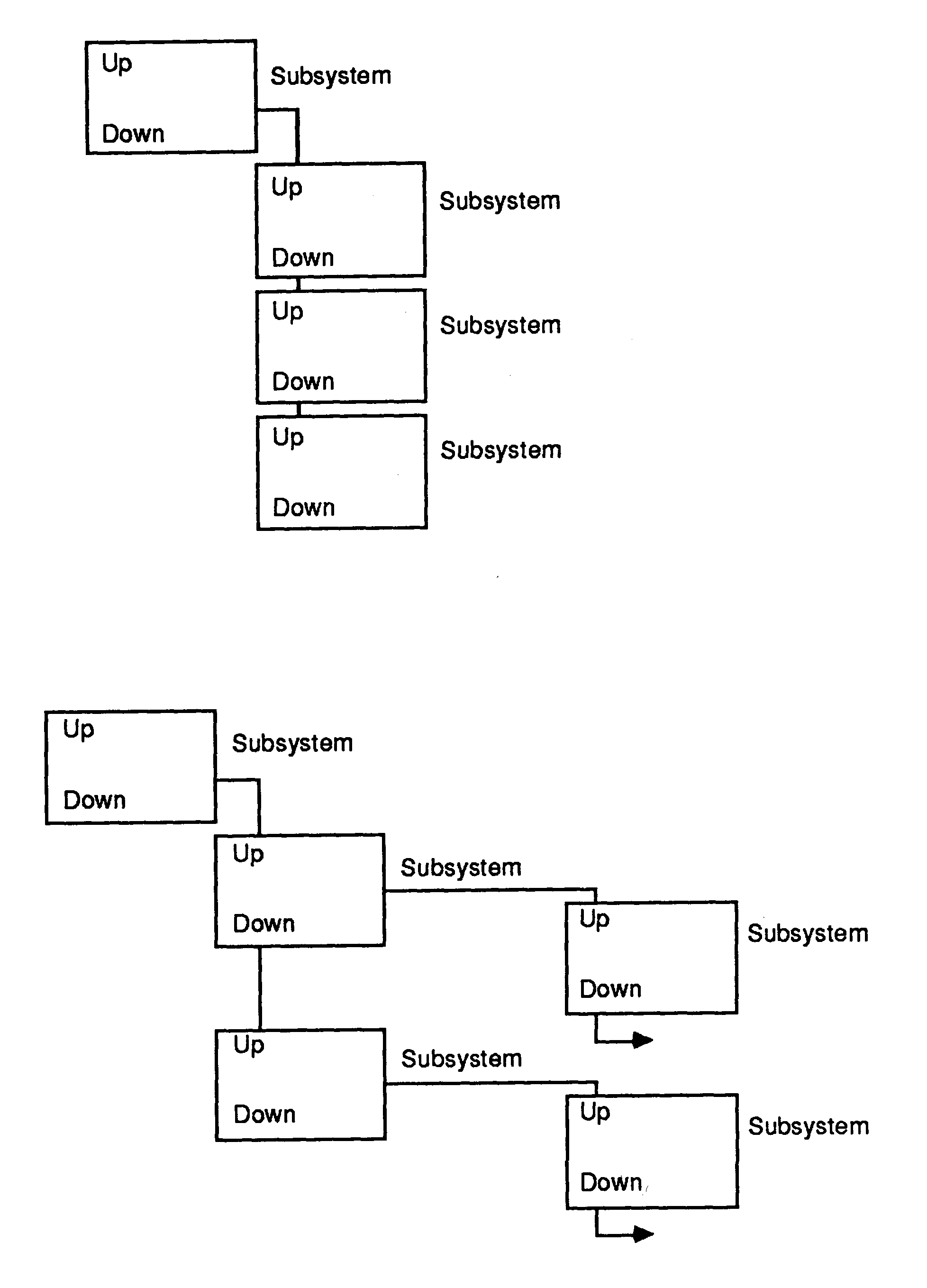
A number of control signals are also brought to the edge of the board, to provide control over the transputer’s reset, analyse and error functions. The system control signals are standard throughout INMOS transputer evaluation boards, and to understand the needs for the hardware to implement these control lines, the system architecture of the boards needs to be examined. Figure 10 shows how a hierarchical network of boards can be built into a large system.
The Up, Down, and Subsystem ports all carry the same control signals. These are
The notReset and notAnalyse signals flow down the system (if the configuration of the system is considered to be as in figure 10), while the notError signal flows upwards. The notAnalyse signal is used to place the system into Analyse mode (see reference 1).
The architecture allows for any board in a chain to act as a master for another chain, allowing large systems to be split up into smaller subsystems, each with its own local controller. If an error occurs in the system, it can be handled by the local controller, without interfering with the rest of the system.
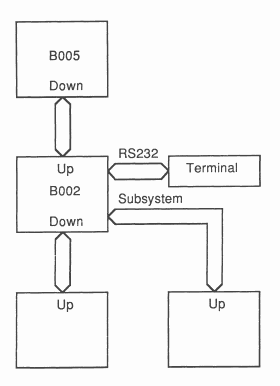
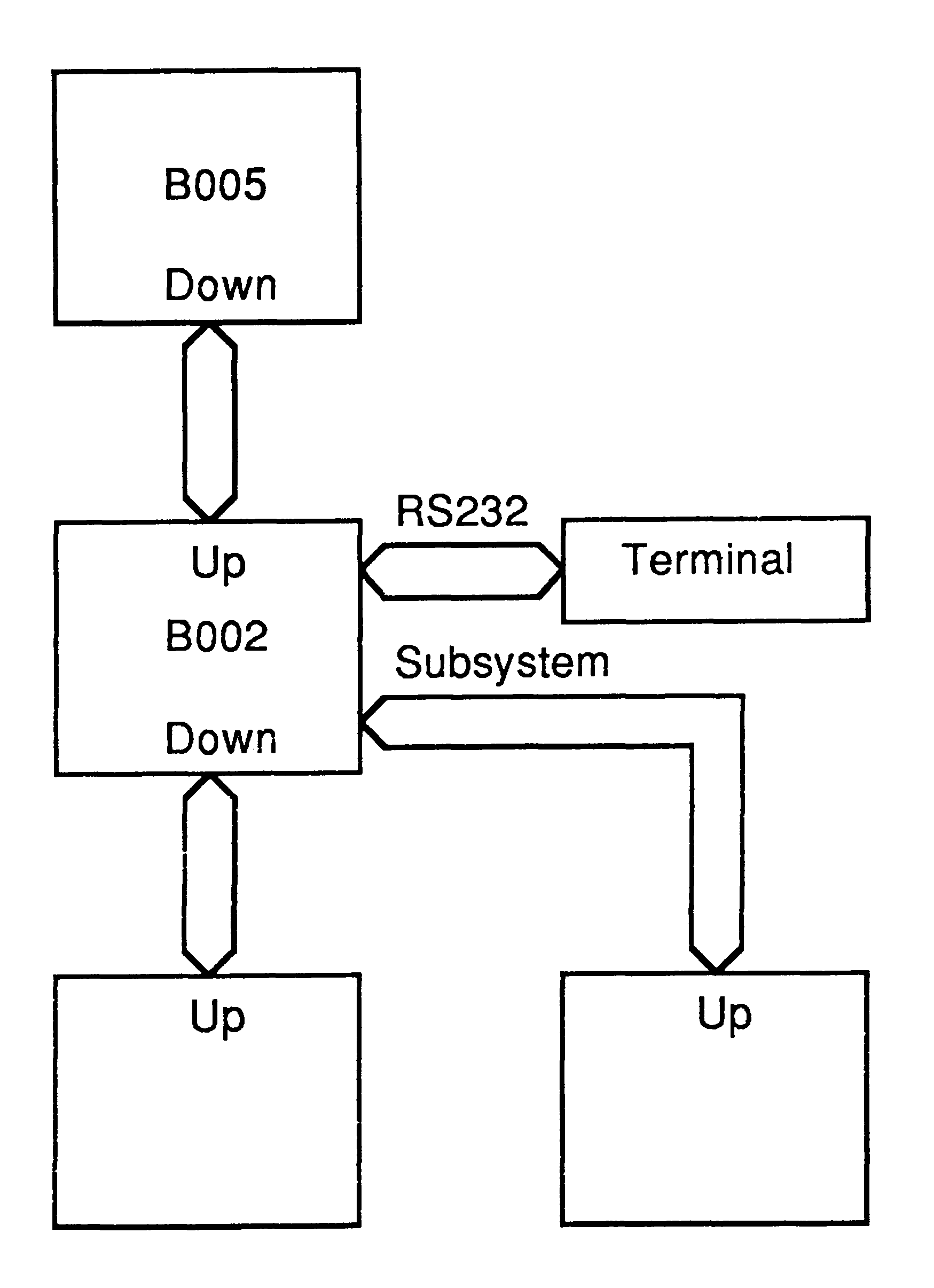
The IMS B005 is designed to be a slave processor within a larger system, and for this reason it does not have a subsystem port. An example configuration of the IMS B005, using other INMOS evaluation boards, is shown in figure 11.
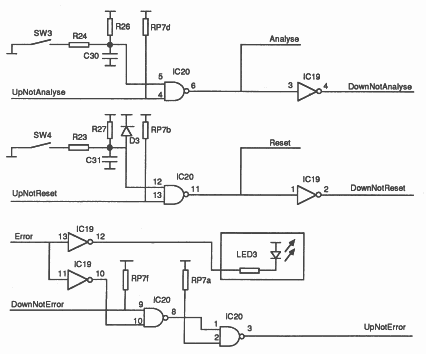
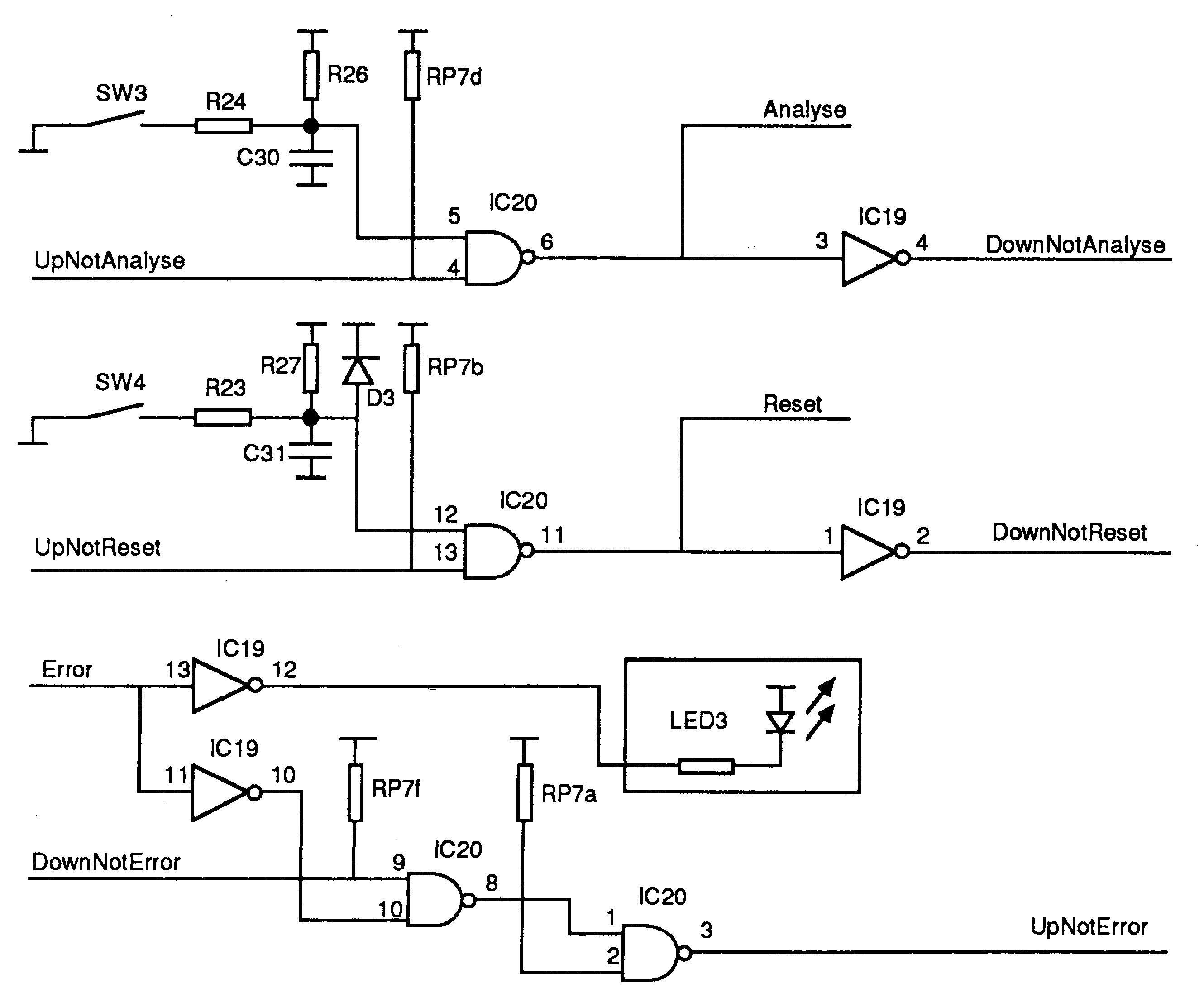
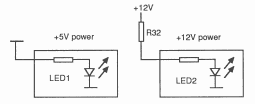
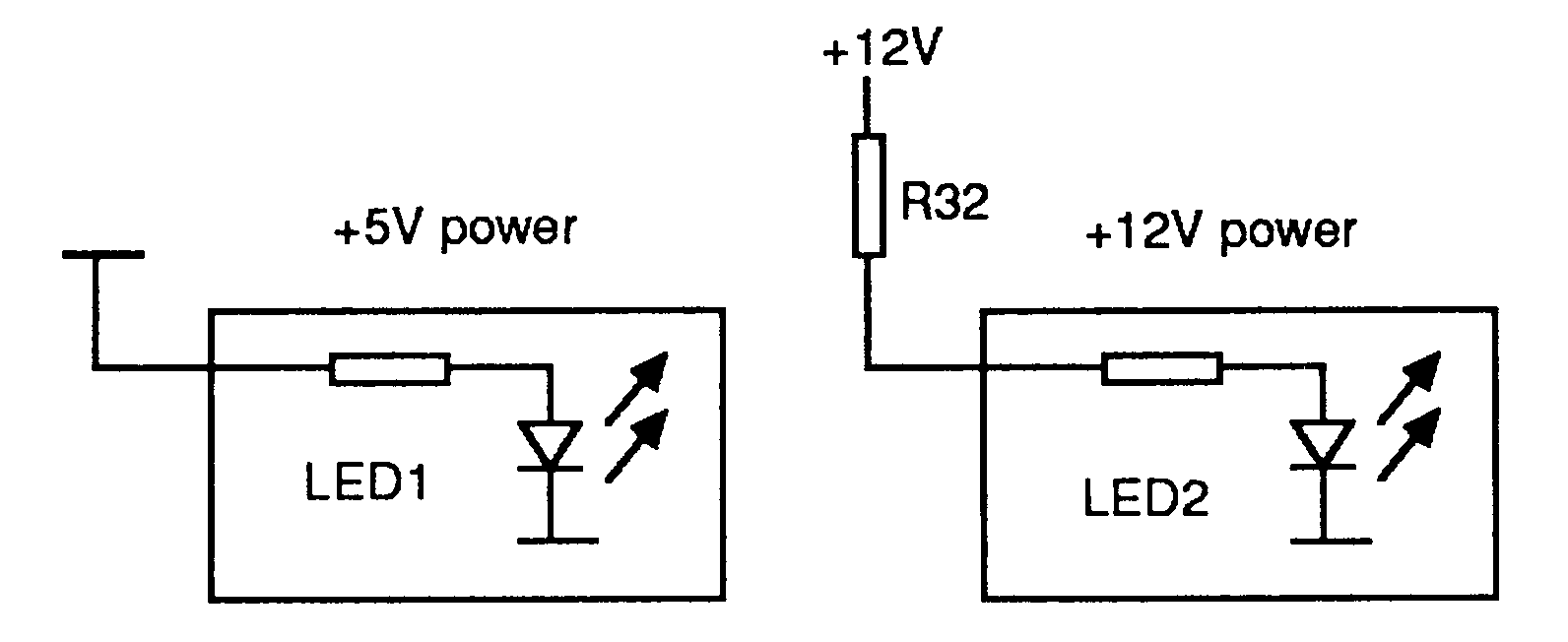
The Down and Up ports on the IMS B005 are implemented as shown in figure 12. The reset and analyse switches (SW4 and SW3 respectively) are situated on the front of the board when it is in a card frame (such as the ITEM). The resistors and capacitors near the switches are simply for debouncing; diode D3 is a protection device, to prevent the board from being powered up with charge remaining on C31, thus ensuring that a power-on reset pulse is always generated. The convention adopted by INMOS for all evaluation boards is to use active-low signals on the ITEM backplane. IC19 and IC20 are used to produce signals of the correct sense for the transputer and to ’or’ the transputers local signals into the chain.
The error pin also drives an LED to indicate that the error has occurred on this board.
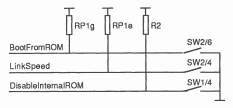
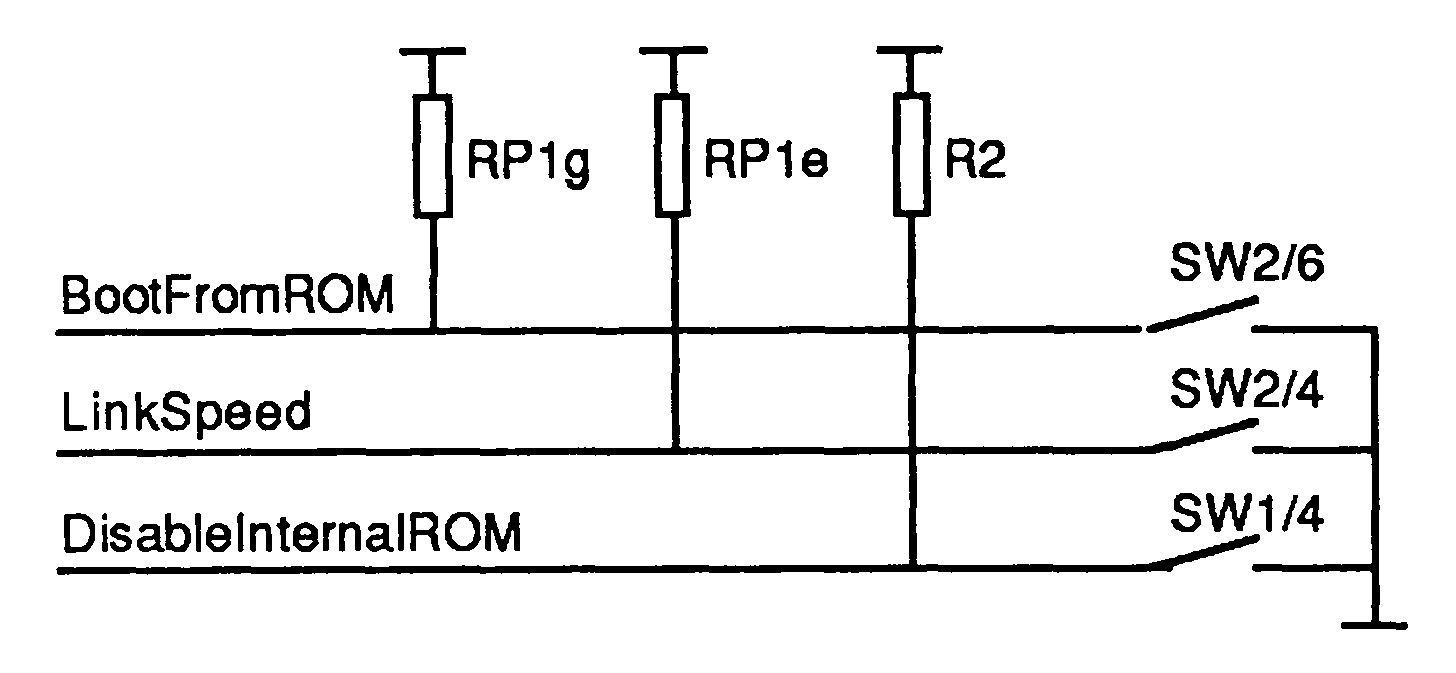
There are several switches which have not been mentioned so far; these are mainly concerned with the M212 functions and are shown in figure 13, along with a description of their effect.
The function of the switches is shown in the table below.
| Switch | Switch function | OFF | ON |
| 1/1 | MemWait 1 | add 1 T-state | add 0 T-states |
| 1/2 | MemWait 2 | add 2 T-states | add 0 T-states |
| 1/3 | MemWait 4 | add 4 T-states | add 0 T-states |
| 1/4 | EnablelntROM | disabled | enabled |
| 2/1 | BootFromDisk | no auto-boot | auto-boot |
| 2/2 | BootDriveSelect0 | add 0 to drive no. | add 1 to drive no. |
| 2/3 | BootDriveSelect1 | winchester(drive 1) | floppy(drive 3) |
| 2/4 | LinkSpeed | 20 Mbits/s | 10 Mbits/s |
| 2/5 | nc | - | - |
| 2/6 | BootFromLink | boot from ROM | boot from link |
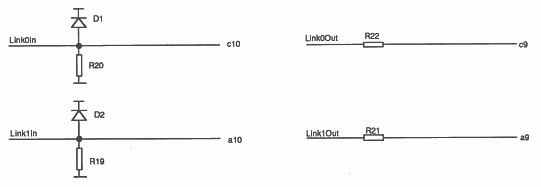
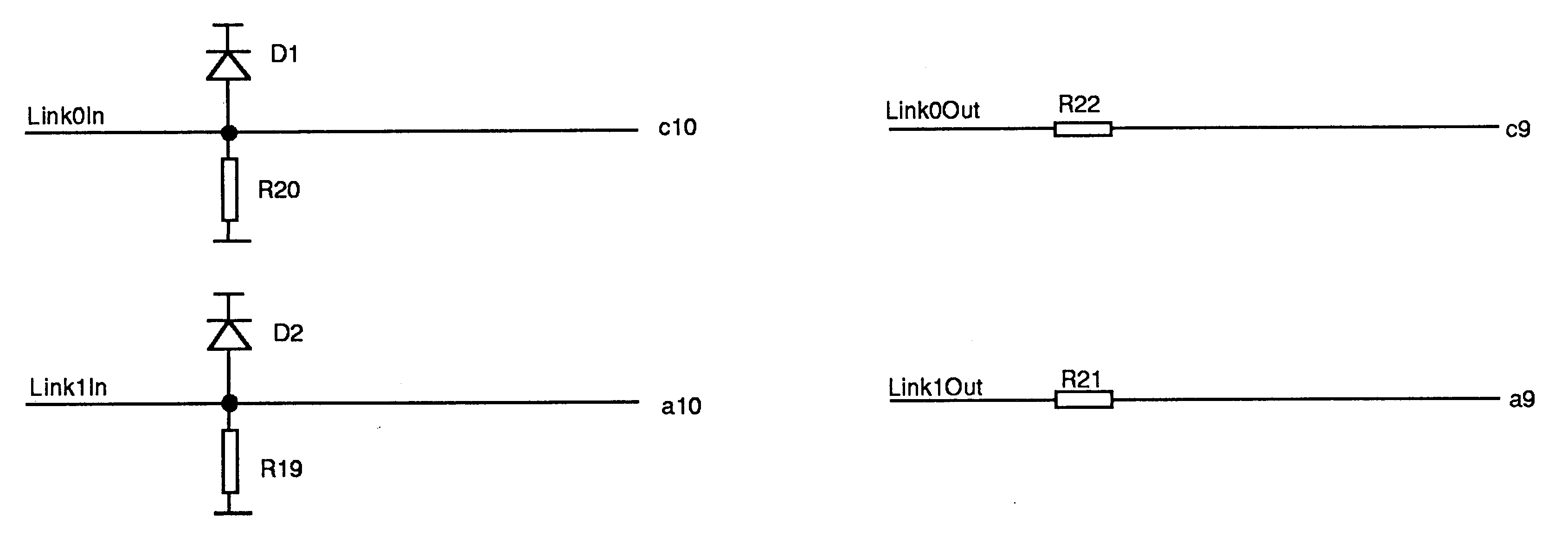
The two links do not require buffering, but the link outputs are terminated with 47 ohm resistors. The link inputs are pulled down with 100K ohm resistors to prevent noise on unused links from causing invalid data requests. Inputs are also protected with diodes, as shown in figure 14.
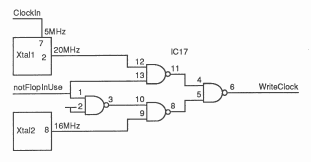
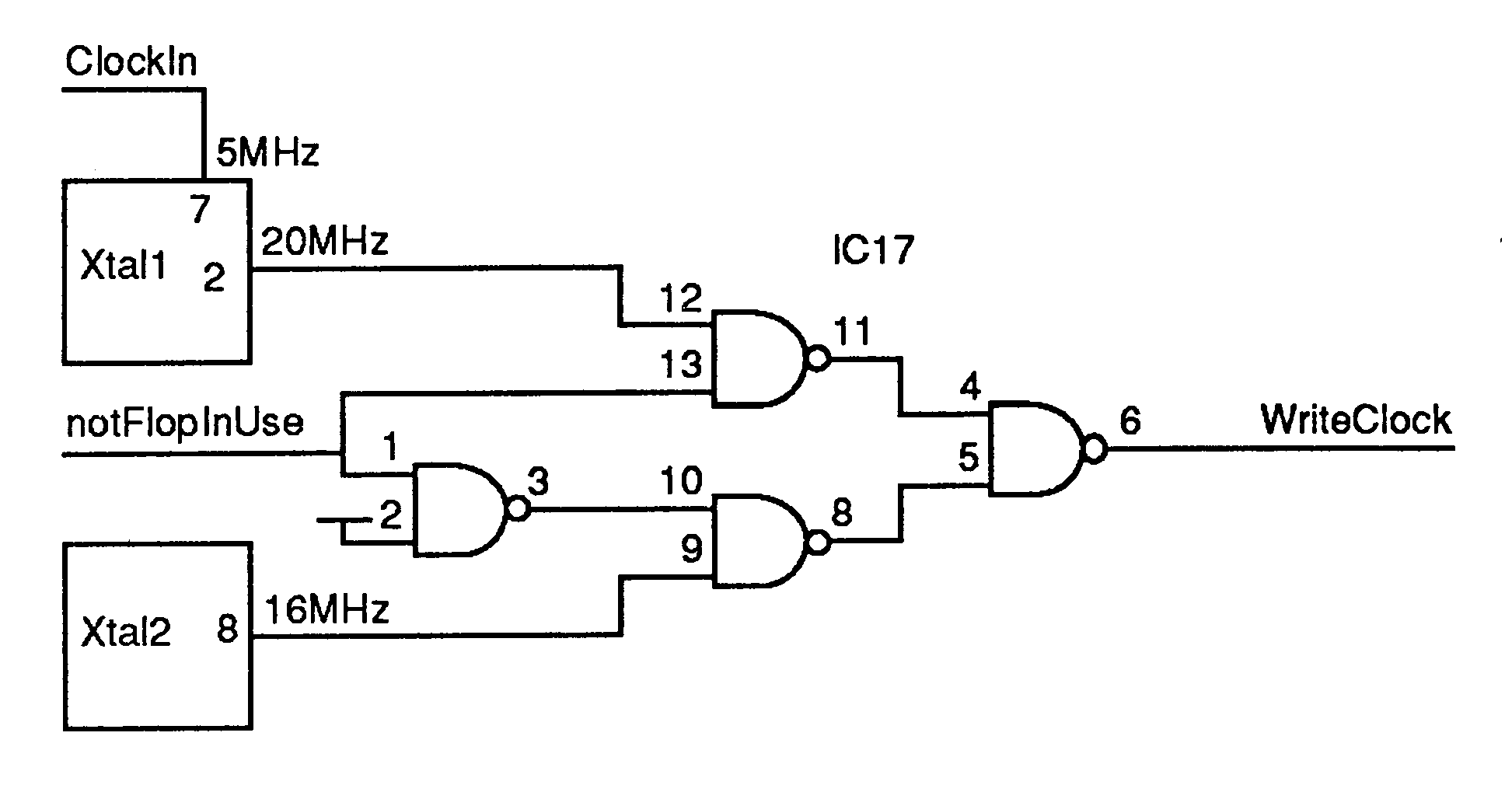
The clocks for the board are provided by X1 and X2. X1 is a 20 MHz crystal oscillator with a divider chain, giving 5 MHz as one of its outputs. The M212 requires 5 MHz as an input clock.
Both winchester and floppy write data are derived from an internal write clock, which the M212 generates from its WriteClock input. The frequencies used are 20 MHz (X1) and 16 MHz (X2) respectively, X2 being a single crystal oscillator package. These frequencies are higher than needed for the write clock as they are also used in the generation of write precompensation delays.
The clock circuits are shown in figure 15 and all other circuit components and unused pins are shown in figure 16.
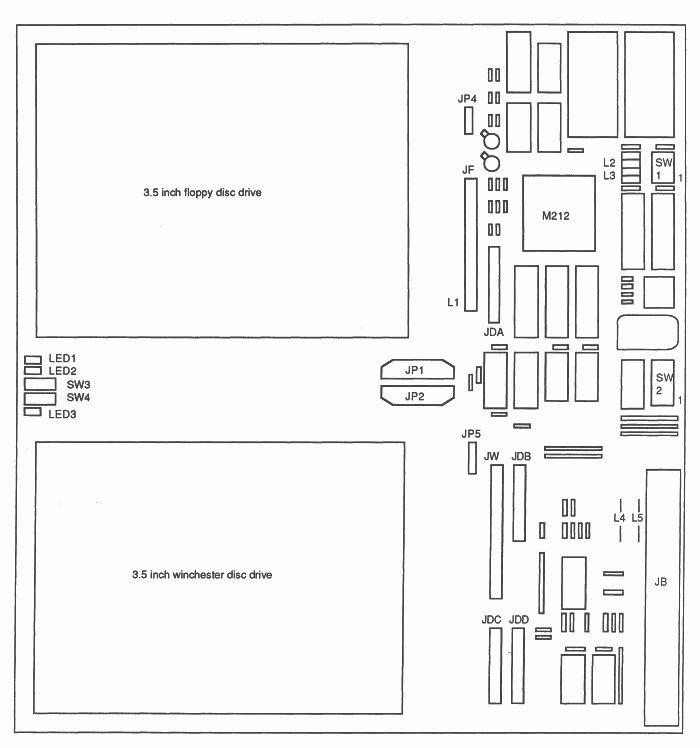
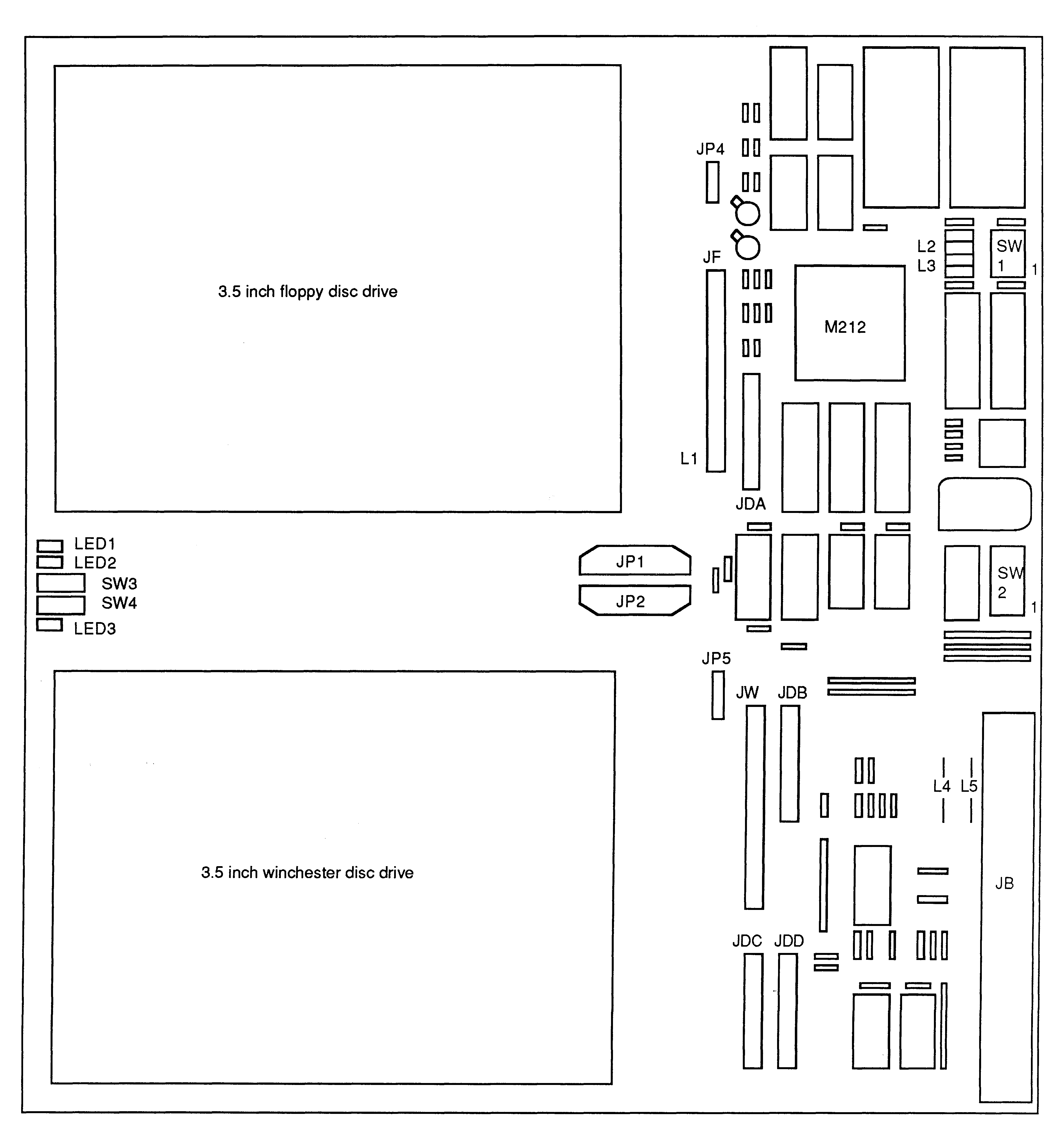
The IMS B005 is a four layer printed circuit board (PCB) measuring 8.65” by 9.2” (extended double eurocard form-factor). The two disk drives are mounted on the board as shown in figure 17. Provision has been made for mounting two types of winchester drive and two types of floppy drive in either position, thus it is possible to replace the floppy drive with a second winchester drive if required by a specific application. The drives used on the IMS B005 are as given below, although other manufacturers drives are compatible.
| Winchester drive | Floppy drive |
| NEC D3126 | NEC FD1035 |
| Olivetti HD352 | TEAC FD35F |
With such a large mass on the board it is necessary to use a metal plate on the solder side of the board for strength. Also, to improve rigidity when used in a card frame, top and bottom brackets were fixed to the exposed sides of each drive such that they locate with adjacent guides in the card frame. It is recommended that the board be mounted vertically due to its high weight.
All disk drives are very sensitive to movement and vibration. In particular, excessive shocks should be avoided. It is not advisable to remove the board with power connected, as the disk is still spinning and a head crash may occur.
The area under the two drives has an isolated Vcc plane (tied to ground) to enable extra mounting holes to be drilled should the user wish to use drives other than those recommended.
All connectors are as close to the drive connectors as possible, keeping the cables short and neat.
The IMS B005 demonstrates the ease with which the M212 can be interfaced to disk drives. The interface requires only a small number of external devices (about 20 ICs) to implement a full four drive controller with external memory and backplane interface, and this fits into a board area of less than 5” by 2”.
Specific user applications may not need all of this additional circuitry; indeed it is possible to control a single floppy using just the M212 (a single winchester drive would require an 8 pin differential driver/receiver package).
The board may be configured to boot from one of its drives by setting the switches. The board is supplied with a test disk and the settings required to boot from this floppy are detailed below. Alternatively, the M212 may be booted from a link, as with other transputer devices. It is likely that the IMS B005 would be used to boot itself from a disk and then pass boot code from that disk to the rest of the transputer system via links.
| SW1/1 | OFF |
| SW1/2 | ON |
| SW1/3 | OFF |
| SW1/4 | ON |
| SW2/1 | ON |
| SW2/2 | OFF |
| SW2/3 | ON |
| SW2/4 | OFF |
| SW2/5 | ON |
| SW2/6 | OFF |
The use of a head ’parking’ track during transit is highly recommended, to avoid any possible damage to data tracks.
The on-chip ROM contains primitive disk routines for a disk operating system. These are fully documented in the M212 user manual (reference 2); users may choose to expand these routines for specific applications and store them in EPROM, or simply send them as a boot program down a link.
Component list:
ICs |
| QTY |
IC1 | IMS M212 | (1) |
IC2 | 74F251 | (1) |
IC3 | 74F164 | (1) |
IC4,IC18,IC19 | 74F04 | (3) |
IC5,IC17 | 74F00 | (2) |
IC6,IC7 | 62256LP-10 (or 27256) | (2) |
IC8 | 74F373 | (1) |
IC9 | 74F245 | (1) |
IC10,IC11 | 74LS641-1 | (2) |
IC12 | 74LS645-1 | (1) |
IC13 | 26LS31 | (1) |
IC14 | 26LS32 | (1) |
IC15 | 74F64 | (1) |
IC16 | 74LS14 | (1) |
IC20 | 74HCT132 | (1) |
IC21 | 74F74 | (1) |
LEDs |
| QTY |
LED1,LED2 | Green (RS 588-342 or equiv) | (2) |
LED3 | Yellow (RS 588-358 or equiv) | (1) |
Crystals |
| QTY |
X1 | 16 MHz oscillator | (1) |
| (Euroquartz XO-1 100 or equiv) | |
X2 | 5 and 20 MHz oscillator | (1) |
| (Euroquartz XO-430P 1.25MHz) | |
|
| |
X2 is available from Euroquartz by special
| ||
order, pin2 connected to 20 MHz.
| ||
Switches |
| QTY |
SW1 | 4 way DIL SPST (STC 63-20151 F) | (1) |
SW2 | 6 way DIL SPST (STC 63-20152B) | (1) |
SW3 | SPDT biased (CK T108) | (1) |
SW4 | SPST push to make (CK TP1 1) | (1) |
IC Sockets |
| QTY |
| 14 pin (0.3” turned pin) | (10) |
| 16 pin (0.3” turned pin) | (3) |
| 20 pin (0.3” turned pin) | (5) |
| 28 pin (0.6” turned pin) | (2) |
| 84 pin PGA (hole in middle for R33/C8) | (1) |
Diodes |
| QTY |
D1,D2 | IN6263 or 6v8 Zener | (2) |
D3 | IN4148 | (1) |
Transistors |
| QTY |
Q1,Q2 | SD214E Mosfet or equiv | (2) |
Resistor networks |
| QTY |
RP1,RP6,RP7 | 4K7 8 pin 7R SIL | (3) |
RP2 | 1K 8 pin 713 SIL | (1) |
RP3 | 22K 8 pin 7R SIL | (1) |
RP4 | 220R 8 pin 7R SIL | (1) |
RP5 | 330R 8 pin 7R SIL | (1) |
|
| |
All resistor packs to be the same make and colour.
| ||
Resistors |
| QTY |
R1,R2,R3,R4,R25 | 4K7 | (5) |
R5 | 680R | (1) |
R6,R11,R13,R15,R23,R24 | 330R | (6) |
R7 | 22K | (1) |
R8 | 18K | (1) |
R9,R10 | 10R | (2) |
R12 | 1K8 | (1) |
R14,R18,R34,R35 | 100R | (4) |
R16,R17 | 220R | (2) |
R19,R20,R26,R27 | 100K | (4) |
R21,R22 | 47R | (2) |
R32,R33 | 1K | (2) |
|
| |
All resistors are 1/8W metal film or carbon composite
| ||
10% tolerence
| ||
Note R35 marked ’R3R’ on silk screen.
| ||
Capacitors |
| QTY |
C28,C29,C31 | 10uF 25V Tantalum | (3) |
C30 | 1uF 10V Tantalum | (1) |
|
| |
C11 | 10nF (STC 17317A) | (1) |
C12 | 150p (STC 17299F) | (1) |
C13 | 6n8 (STC 43008F) | (1) |
C14 | 47n (STC 17319H) | (1) |
C15 | 330p (STC 17303B) | (1) |
C16 | 1nF (STC 17306G) | (1) |
|
| |
C11 to C16 inclusive are 5mm pitch radial ceramic
| ||
C11,C12,C14 to C16 are Vitramon VK series (STC)
| ||
C13 is STC8113 series (STC 43008F)
| ||
|
| |
C1-C10,C17-C27,C32-C34 | 100nF multilayer ceramic | (24) |
All are radial with the following pitches:
| ||
4mm (2), 5mm (11), 7mm (9), 9mm (1)
| ||
Headers |
| QTY |
JDA,JDB,JDC,JDD | 20way header(VERO 901-71295G) | (4) |
JF,JW | 34way header(VERO 901-71298J) | (2) |
L1,L2 | 6way header(VERO 901-71292E) | (2) |
Links | 0.1” links (RS 334-561) | (4) |
|
| |
Headers may be obtained in longer strips and split as required.
| ||
Plug/sockets |
| QTY |
Floppy power | 4way (Amp P/N 171826-4) | (1) |
Winnie power | 4way (RS 471-430) | (2) |
Backplane | 64way a/c DIN41612(RS 471-452) | (1) |
Cables |
| QTY |
Floppy power | 4way plug (AMP P/N 171822-4) | (2) |
| Pins loose (AMP P/N 170204-2) | (8) |
| Pins strip (AMP P/N 170262-2) | |
|
| |
Winnie power | 4way socket (RS 471-424) | (2) |
|
| |
Floppy power con made up with 16/0.2mm (0.5 square mm) cable
| ||
Winnie power con made up with 32/0.2mm (1.0 square mm) cable
| ||
|
| |
Floppy signal | 34way IDC (RS 474-322) | (2) |
Winnie Data | 20way IDC (RS 474-300) | (1) |
| 20way IDC edge (RS 471-266) | (1) |
Winnie ctrl | 34way IDC (RS 474-322) | (1) |
| 34way IDC edge (RS 471-288) | (1) |
|
| |
All IDC connectors use ribbon cable (RS 360-122 or RS 360-166)
| ||
Screws |
| QTY |
| 8mm length 6-32 UNC pan head | (6) |
| 7mm length 4-40 UNC pan head | (6) |
| 7mm length M3 pan head | (6) |
PCB |
| QTY |
| 221-CBRD-037-01 | (1) |